Document Outline
- FEATURES
- APPLICATIONS
- DESCRIPTION
- PACKAGE/ORDERING INFORMATION(1)
- ABSOLUTE MAXIMUM RATINGS(1)
- PIN CONFIGURATION
- PIN DESCRIPTIONS
- ELECTRICAL CHARACTERISTICS
- TIMING CHARACTERISTICS
- TYPICAL CHARACTERISTICS: +2.7V
- THEORY OF OPERATION
- ANALOG INPUT
- INTERNAL REFERENCE
- REFERENCE INPUT
- REFERENCE MODE
- TOUCH SCREEN SETTLING
- TEMPERATURE MEASUREMENT
- BATTERY MEASUREMENT
- PRESSURE MEASUREMENT
- DIGITAL INTERFACE
- Address Byte
- Command Byte
- Start A Conversion/Write Cycle
- Read A Conversion/Read Cycle
- I2C High-Speed Operation
- Data Format
- 8-Bit Conversion
- LAYOUT

PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
I
2
C TOUCH SCREEN CONTROLLER
FEATURES
q
2.5V TO 5.25V OPERATION
q
INTERNAL 2.5V REFERENCE
q
DIRECT BATTERY MEASUREMENT
(0.5V TO 6V)
q
ON-CHIP TEMPERATURE MEASUREMENT
q
TOUCH-PRESSURE MEASUREMENT
q
I
2
C INTERFACE SUPPORTS:
Standard, Fast, and High-Speed Modes
q
AUTO POWER DOWN
q
TSSOP-16 AND VFBGA-48 PACKAGES
APPLICATIONS
q
PERSONAL DIGITAL ASSISTANTS
q
PORTABLE INSTRUMENTS
q
POINT-OF-SALES TERMINALS
q
PAGERS
q
TOUCH SCREEN MONITORS
q
CELLULAR PHONES
DESCRIPTION
The TSC2003 is a 4-wire resistive touch screen controller. It
also features direct measurement of two batteries, two aux-
iliary analog inputs, temperature measurement, and touch-
pressure measurement.
The TSC2003 has an on-chip 2.5V reference that can be
utilized for the auxiliary inputs, battery monitors, and tem-
perature-measurement modes. The reference can also be
powered down when not used to conserve power. The
internal reference will operate down to 2.7V supply voltage
while monitoring the battery voltage from 0.5V to 6V.
The TSC2003 is available in the small TSSOP-16 and
VFBGA-48 packages and is specified over the �40
�
C to
+85
�
C temperature range.
TSC2
003
TSC
2003
CDAC
SAR
Comparator
MUX
I
2
C
Interface
and
Control
Logic
SCL
SDA
A0
A1
Internal
Clock
Internal
+2.5V
REF
TEMP0
TEMP1
PENIRQ
Channel Select
V
DD
V
DD
X+
X�
Y+
Y�
V
BAT1
V
BAT2
V
REF
IN1
IN2
TSC2003
SBAS162D � NOVEMBER 2000 � REVISED SEPTEMBER 2004
www.ti.com
Copyright � 2000-2004, Texas Instruments Incorporated
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
All trademarks are the property of their respective owners.

TSC2003
2
SBAS162D
www.ti.com
MAXIMUM
MAXIMUM
SPECIFIED
RELATIVE ACCURACY GAIN ERROR
PACKAGE
TEMPERATURE
PACKAGE
ORDERING
TRANSPORT
PRODUCT
(LSB)
(LSB)
PACKAGE-LEAD
DESIGNATOR
RANGE
MARKING
NUMBER
MEDIA, QUANTITY
TSC2003
�
2
�
4
TSSOP-16
PW
�40
�
C to +85
�
C
TSC2003I
TSC2003IPW
Tube, 94
"
"
"
"
"
"
"
TSC2003IPWR
Tape and Reel, 2500
TSC2003
�
2
�
4
VFBGA-48
ZQC
�40
�
C to +85
�
C
BC2003
TSC2003IZQCR
Tape and Reel, 2500
NOTE: (1) For the most current package and ordering information, see the Package Option Addendum located at the end of this data sheet.
PIN CONFIGURATION
Top View
VFBGA
PIN DESCRIPTIONS
TSSOP
VFBGA
PIN #
PIN #
NAME
DESCRIPTION
1
C1, D1
+V
DD
Power Supply
2
E1
X+
X+ Position Input
3
F1
Y+
Y+ Position Input
4
G1
X�
X� Position Input
5
G2
Y�
Y� Position Input
6
G3, G4
GND
Ground
7
G5
V
BAT1
Battery Monitor Input
8
G6
V
BAT2
Battery Monitor Input
9
B7
V
REF
Voltage Reference Input/Output
10
A7
PENIRQ
Pen Interrupt. Open Drain Output (Requires
30k
to 100k
pull-up resistor externally).
11
A6
SDA
Serial Data
12
A4
SCL
Serial Clock
13
A3
A1
I
2
C Bus Address Input A1
14
A2
A0
I
2
C Bus Address Input A0
15
A1
IN2
Auxiliary A/D Converter Input
16
B1
IN1
Auxiliary A/D Converter Input
ABSOLUTE MAXIMUM RATINGS
(1)
+V
DD
to GND ........................................................................ �0.3V to +6V
Digital Input Voltage to GND ................................. �0.3V to +V
DD
+ 0.3V
Analog Input Voltage to GND. All Pins Except 7, 8 ...... �0.3V to +V
DD
+ 0.3V
Analog Input Voltage Pins 7, 8 to GND ........................... �0.3V to +6.0V
Operating Temperature Range ........................................ �40
�
C to +85
�
C
Storage Temperature Range ......................................... �65
�
C to +150
�
C
Power Dissipation .......................................................... (T
J
Max � T
A
)/
JA
TSSOP Package
Junction Temperature (T
J
Max) .............................................. +150
�
C
JA
Thermal Impedance ................................................... +115.2
�
C/W
Lead Temperature, Soldering
Vapor Phase (60s) ............................................................ +215
�
C
Infrared (15s) ..................................................................... +220
�
C
VFBGA Package
Junction Temperature (T
J
Max) .............................................. +125
�
C
JA
Thermal Impedance ........................................................ +50
�
C/W
Lead Temperature, Soldering
Vapor Phase (60s) ............................................................ +215
�
C
Infrared (15s) ..................................................................... +220
�
C
NOTE: (1) Stresses above those listed under
Absolute Maximum Ratings may
cause permanent damage to the device. Exposure to absolute maximum
conditions for extended periods may affect device reliability.
ELECTROSTATIC
DISCHARGE SENSITIVITY
This integrated circuit can be damaged by ESD. Texas Instru-
ments recommends that all integrated circuits be handled with
appropriate precautions. Failure to observe proper handling
and installation procedures can cause damage.
ESD damage can range from subtle performance degrada-
tion to complete device failure. Precision integrated circuits
may be more susceptible to damage because very small
parametric changes could cause the device not to meet its
published specifications.
PACKAGE/ORDERING INFORMATION
(1)
1
2
3
4
5
6
7
8
+V
DD
X+
Y+
X�
Y�
GND
V
BAT1
V
BAT2
IN1
IN2
A0
A1
SCL
SDA
PENIRQ
V
REF
16
15
14
13
12
11
10
9
TSC2003
Top View
TSSOP
NC = No Connection
NC
NC
A
2
1
3
4
5
6
7
A0
IN1
IN2
+V
DD
+V
DD
X+
Y+
PENIRQ
V
REF
A1
SCL
SDA
X
-
Y
-
GND
GND
V
BAT1
NC
NC
NC
NC
NC
B
C
D
E
F
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
NC
G
V
BAT2

TSC2003
3
SBAS162D
www.ti.com
PARAMETER
CONDITIONS
MIN
TYP
MAX
UNITS
ANALOG INPUT
Full-Scale Input Span
0
V
REF
V
Absolute Input Range
�0.2
+V
DD
+0.2
V
Capacitance
25
pF
Leakage Current
0.1
�
A
SYSTEM PERFORMANCE
Resolution
12
Bits
No Missing Codes
Standard and Fast Mode
11
Bits
High-Speed Mode
10
Bits
Integral Linearity Error
Standard and Fast Mode
�
2
LSB
(1)
High-Speed Mode
�
4
LSB
Offset Error
�
6
LSB
Gain Error
�
4
LSB
Noise
Including Internal V
REF
70
�
Vrms
Power-Supply Rejection Ratio
70
dB
SAMPLING DYNAMICS
Throughput Rate
50
ksps
Channel-to-Channel Isolation
V
IN
= 2.5Vp-p at 50kHz
100
dB
SWITCH DRIVERS
On-Resistance
Y+, X+
5.5
Y�, X�
7.3
Drive Current
(2)
Duration 100ms
50
mA
REFERENCE OUTPUT
Internal Reference Voltage
2.45
2.50
2.55
V
Internal Reference Drift
25
ppm/
�
C
Output Impedance
Internal Reference ON
300
Internal Reference OFF
1
G
Quiescent Current
PD1 = 1, PD0 = 0, SDA, SCL High
750
�
A
REFERENCE INPUT
Range
2.0
V
DD
V
Resistance
PD1 = PD0 = 0
1
G
BATTERY MONITOR
Input Voltage Range
0.5
6.0
V
Input Impedance
Sampling Battery
10
k
Battery Monitor OFF
1
G
Accuracy
External V
REF
= 2.5V
�2
+2
%
Internal Reference
�3
+3
%
TEMPERATURE MEASUREMENT
Temperature Range
�40
+85
�
C
Resolution
Differential Method
(3)
1.6
�
C
TEMP0
(4)
0.3
�
C
Accuracy
Differential Method
(3)
�
2
�
C
TEMP0
(4)
�
3
�
C
DIGITAL INPUT/OUTPUT
Logic Family
CMOS
Logic Levels, Except PENIRQ
V
IH
| I
IH
|
+5
�
A
+V
DD
� 0.7
+V
DD
+ 0.3
V
V
IL
| I
IL
|
+5
�
A
�0.3
+V
DD
� 0.3
V
V
OH
I
OH
= �250
�
A
+V
DD
� 0.8
V
V
OL
I
OL
= 250
�
A
0.4
V
PENIRQ V
OL
30k
Pull-Up
0.4
V
Data Format
Straight
Binary
Input Capacitance
SDA, SCL Lines
10
pF
ELECTRICAL CHARACTERISTICS
At T
A
= �40
�
C to +85
�
C, +V
DD
= +2.7V, V
REF
= 2.5V external voltage, I
2
C bus frequency = 3.4MHz, 12-bit mode and digital inputs = GND or +V
DD
, unless
otherwise noted.
TSC2003I

TSC2003
4
SBAS162D
www.ti.com
PARAMETER
CONDITIONS
MIN
TYP
MAX
UNITS
POWER-SUPPLY REQUIREMENTS
+V
DD
Specified Performance
2.7
3.6
V
Operating Range
2.5
5.25
V
Quiescent Current
Internal Reference OFF,
PD1 = PD0 = 0
High-Speed Mode: SCL = 3.4MHz
254
650
�
A
Fast Mode: SCL = 400kHz
95
�
A
Standard Mode: SCL = 100kHz
63
�
A
Internal Reference ON, PD0 = 0
1005
�
A
Power-Down Current when Part is
Internal Reference OFF,
Not Addressed
PD1 = PD0 = 0
High-Speed Mode: SCL = 3.4MHz
90
�
A
Fast Mode: SCL = 400kHz
21
�
A
Standard Mode: SCL = 100kHz
4
�
A
PD1 = PD0 = 0, SDA = SCL = +V
DD
3
�
A
Power Dissipation
+V
DD
= +2.7V
1.8
mW
TEMPERATURE RANGE
Specified Performance
�40
+85
�
C
NOTES: (1) LSB means Least Significant Bit. With V
REF
equal to +2.5V, one LSB is 610
�
V. (2) Ensured by design, but not tested. Exceeding 50mA source current may
result in device degradation. (3) Difference between TEMP0 and TEMP1 measurement. No calibration necessary. (4) Temperature drift is �2.1mV/
�
C.
ELECTRICAL CHARACTERISTICS
(Cont.)
At T
A
= �40
�
C to +85
�
C, +V
DD
= +2.7V, V
REF
= 2.5V external voltage, I
2
C bus frequency = 3.4MHz, 12-bit mode and digital inputs = GND or +V
DD
, unless
otherwise noted.
TSC2003I
TIMING CHARACTERISTICS
At T
A
= �40
�
C to +85
�
C, +V
DD
= +2.7V, unless otherwise noted. All values referred to V
IHMIN
and V
ILMAX
levels.
PARAMETER
SYMBOL
CONDITIONS
MIN
MAX
UNITS
SCL Clock Frequency
f
SCL
Standard Mode
0
100
kHz
Fast Mode
0
400
kHz
High-Speed Mode, C
b
= 100pF max
0
3.4
MHz
High-Speed Mode, C
b
= 400pF max
0
1.7
MHz
Bus Free Time Between a STOP and
t
BUF
Standard Mode
4.7
�
s
Start Condition
Fast Mode
1.3
�
s
Hold Time (Repeated) START
t
HD;
STA
Standard Mode
4.0
�
s
Condition
Fast Mode
600
ns
High-Speed Mode
160
ns
LOW Period of the SCL Clock
t
LOW
Standard Mode
4.7
�
s
Fast Mode
1.3
�
s
High-Speed Mode, C
b
= 100pF max
160
ns
High-Speed Mode, C
b
= 400pF max
320
ns
HIGH Period of the SCL Clock
t
HIGH
Standard Mode
4.0
�
s
Fast Mode
600
ns
High-Speed Mode, C
b
= 100pF max
60
ns
High-Speed Mode, C
b
= 400pF max
120
ns
Setup Time for a Repeated START
t
SU;
STA
Standard Mode
4.7
�
s
Condition
Fast Mode
600
ns
High-Speed Mode
160
ns
Data Setup Time
t
SU;
DAT
Standard Mode
250
ns
Fast Mode
100
ns
High-Speed Mode
10
ns
Data Hold Time
t
HD;
DAT
Standard Mode
0
3.45
�
s
Fast Mode
0
0.9
�
s
High-Speed Mode, C
b
= 100pF max
0
70
ns
High-Speed Mode, C
b
= 400pF max
0
150
ns
Rise Time of SCL Signal
t
rCL
Standard Mode
1000
ns
Fast Mode
20 + 0.1C
b
300
ns
High-Speed Mode, C
b
= 100pF max
10
40
ns
High-Speed Mode, C
b
= 400pF max
20
80
ns
Rise Time of SCL Signal After a
t
rCL1
Standard Mode
1000
ns
Repeated START Condition and
Fast Mode
20 + 0.1C
b
300
ns
After an Acknowledge Bit
High-Speed Mode, C
b
= 100pF max
10
80
ns
High-Speed Mode, C
b
= 400pF max
20
160
ns

TSC2003
5
SBAS162D
www.ti.com
Fall Time of SCL Signal
t
fCL
Standard Mode
300
ns
Fast Mode
20 + 0.1C
b
300
ns
High-Speed Mode, C
b
= 100pF max
10
40
ns
High-Speed Mode, C
b
= 400pF max
20
80
ns
Rise Time of SDA Signal
t
rDA
Standard Mode
1000
ns
Fast Mode
20 + 0.1C
b
300
ns
High-Speed Mode, C
b
= 100pF max
10
80
ns
High-Speed Mode, C
b
= 400pF max
20
160
ns
Fall Time of SDA Signal
t
fDA
Standard Mode
300
ns
Fast Mode
20 + 0.1C
b
300
ns
High-Speed Mode, C
b
= 100pF max
10
80
ns
High-Speed Mode, C
b
= 400pF max
20
160
ns
Setup Time for STOP Condition
t
SU;
STO
Standard Mode
4.0
�
s
Fast Mode
600
ns
High-Speed Mode
160
ns
Capacitive Load for SDA or SCL
C
b
Standard Mode
400
pF
Line
Fast Mode
400
pF
High-Speed Mode, SCL = 1.7MHz
400
pF
High-Speed Mode, SCL = 3.4MHz
100
pF
Pulse Width of Spike Suppressed
t
SP
Fast Mode
0
50
ns
High-Speed Mode
0
10
ns
Noise Margin at the HIGH Level for
Standard Mode
Each Connected Device (Including
V
nH
Fast Mode
0.2V
DD
V
Hysteresis)
High-Speed Mode
Noise Margin at LOW Level for Each
V
nL
Standard Mode
Connected Device (Including
Fast Mode
0.1V
DD
V
Hysteresis)
High-Speed Mode
TIMING CHARACTERISTICS
(Cont.)
At T
A
= �40
�
C to +85
�
C, +V
DD
= +2.7V, unless otherwise noted. All values referred to V
IHMIN
and V
ILMAX
levels.
PARAMETER
SYMBOL
CONDITIONS
MIN
MAX
UNITS
TIMING DIAGRAM
t
rCL
t
BUF
t
LOW
t
fCL
t
HD; STA
t
SP
t
rCL1
t
HD; STA
t
SU; STA
t
HD; DAT
t
SU; DAT
t
HIGH
t
SU; STO
SCL
SDA
t
fDA
t
rDA
START
REPEATED
START
STOP

TSC2003
6
SBAS162D
www.ti.com
TYPICAL CHARACTERISTICS: +2.7V
At T
A
= +25
�
C, +V
DD
= +2.7V, V
REF
= External +2.5V, I
2
C bus frequency = 3.4MHz, PD1 = PD0 =0, unless otherwise noted.
SUPPLY CURRENT vs TEMPERATURE
�40
�20
0
20
40
60
80
100
Temperature (
�
C)
Supply Current (
�
A)
300
250
200
150
100
50
0
High-Speed Mode = 3.4MHz
Fast Mode = 400kHz
Standard Mode = 100kHz
SUPPLY CURRENT vs V
DD
Supply Current (
�
A)
1200
1100
1000
900
800
700
600
500
400
300
200
100
0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
V
DD
(V)
High-Speed Mode = 3.4MHz
Fast Mode = 400kHz
Standard Mode = 100kHz
SUPPLY CURRENT vs I
2
C BUS FREQUENCY
10
10000
100
1000
I
2
C Bus Frequency (kHz)
Supply Current (
�
A)
300
250
200
150
100
50
High-Speed Mode
Fast/Standard Mode
SUPPLY CURRENT (Part Not Addressed) vs V
DD
2.5
3.0
3.5
4.0
4.5
5.0
5.5
V
DD
(V)
Supply Current (
�
A)
1000
900
800
700
600
500
400
300
200
100
0
High-Speed Mode = 3.4MHz
Fast
Mode = 400kHz
Standard
Mode = 100kHz
SUPPLY CURRENT (Part Not Addressed)
vs TEMPERATURE
�40
�20
0
20
40
80
60
100
Temperature (
�
C)
Supply Current (
�
A)
100
90
80
70
60
50
40
30
20
10
0
High-Speed Mode = 3.4MHz
Fast Mode = 400kHz
Standard Mode = 100kHz
CHANGE IN GAIN vs TEMPERATURE
20
�40
100
�20
0
40
Temperature (
�
C)
Gain Delta from +25
�
C (LSB)
4.0
3.0
2.0
1.0
0.0
�1.0
�2.0
�3.0
�4.0
60
80

TSC2003
7
SBAS162D
www.ti.com
TYPICAL CHARACTERISTICS: +2.7V
(Cont.)
At T
A
= +25
�
C, +V
DD
= +2.7V, V
REF
= External +2.5V, I
2
C bus frequency = 3.4MHz, PD1 = PD0 =0, unless otherwise noted.
CHANGE IN OFFSET vs TEMPERATURE
20
�40
100
�20
0
40
Temperature (
�
C)
Offset Delta from +25
�
C (LSB)
6.0
5.0
4.0
3.0
2.0
1.0
0.0
�1.0
�2.0
�3.0
�4.0
�5.0
�6.0
60
80
EXTERNAL REFERENCE CURRENT
vs TEMPERATURE
20
�40
100
�20
0
40
Temperature (
�
C)
External Reference Current (
�
A)
10
9
8
7
6
5
4
3
2
1
0
60
80
High-Speed Mode = 3.4MHz
Fast Mode = 400kHz
Standard Mode = 100kHz
SWITCH-ON RESISTANCE vs V
DD
(X+, Y+: +V
DD
to Pin; X�, Y�: Pin to GND)
4
2.5
5.5
3
X+
X�
Y�
4.5
V
DD
(V)
R
ON
(
)
9
8
7
6
5
4
3
2
1
0
5
3.5
Y+
SWITCH-ON RESISTANCE vs TEMPERATURE
(X+, Y+: +V
DD
to Pin; X�, Y�: Pin to GND)
�40
100
�20
X+
X�
Y�
40
Temperature (
�
C)
R
ON
(
)
9
8
7
6
5
4
3
2
1
0
60
80
0
20
Y+
2.55
2.54
2.53
2.52
2.51
2.50
2.49
2.48
2.47
2.46
2.45
Internal V
REF
(V)
Temperature (
�
C)
�
40
�
35
�
30
�
25
�
20
�
15
�
10
�
05
0
05
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
INTERNAL V
REF
vs TEMPERATURE
INTERNAL V
REF
vs V
DD
4
2.5
5.5
3
4.5
V
DD
(V)
Internal V
REF
(V)
2.55
2.54
2.53
2.52
2.51
2.50
2.49
2.48
2.47
2.46
2.45
5
3.5

TSC2003
8
SBAS162D
www.ti.com
TYPICAL CHARACTERISTICS: +2.7V
(Cont.)
At T
A
= +25
�
C, +V
DD
= +2.7V, V
REF
= External +2.5V, I
2
C bus frequency = 3.4MHz, PD1 = PD0 =0, unless otherwise noted.
850
800
750
700
650
600
550
500
450
T
emp Diode V
oltage (mV)
Temperature (
�
C)
�
40
�
35
�
30
�
25
�
20
�
15
�
10
�
05
0
05
10
15
20
25
30
35
40
45
50
55
60
65
70
75
80
85
TEMP DIODE VOLTAGE vs TEMPERATURE
TEMP1
TEMP0
TEMP0 DIODE VOLTAGE vs V
DD
(25
�
C)
2.5
3.0
3.5
4.0
4.5
5.0
5.5
V
DD
(V)
TEMP0 Diode Voltage (mV)
614
613
612
611
610
TEMP1 DIODE VOLTAGE vs V
DD
(25
�
C)
2.5
3.0
3.5
4.0
4.5
5.0
5.5
V
DD
(V)
TEMP1 Diode Voltage (mV)
738
736
734
732
730
728
726
724
722
720
TSC2003
9
SBAS162D
www.ti.com
THEORY OF OPERATION
The TSC2003 is a classic Successive Approximation
Register (SAR) Analog-to-Digital (A/D) converter. The archi-
tecture is based on capacitive redistribution which inherently
includes a sample-and-hold function. The converter is fabri-
cated on a 0.6
�
CMOS process.
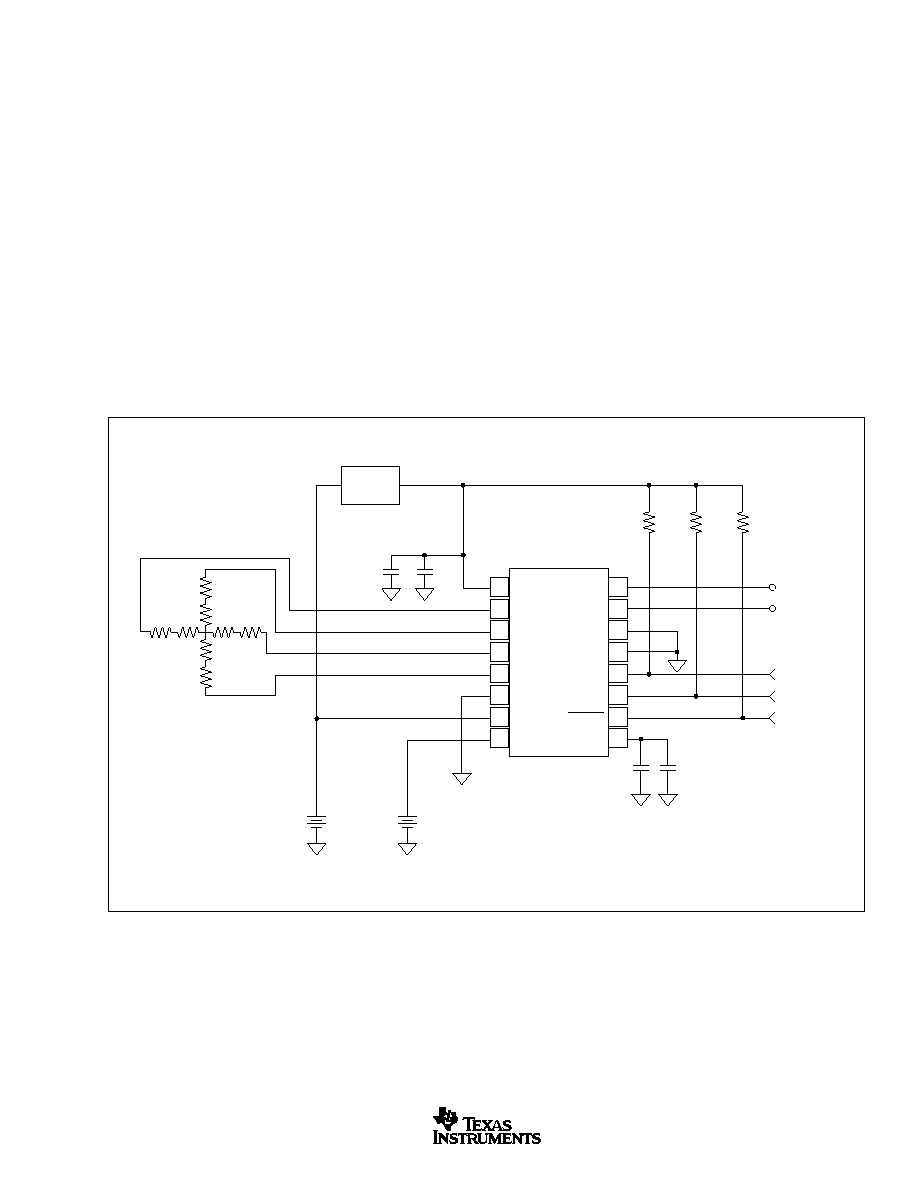
The basic operation of the TSC2003 is shown in Figure 1.
The device features an internal 2.5V reference and an
internal clock. Operation is maintained from a single supply
of 2.7V to 5.25V. The internal reference can be overdriven
with an external, low-impedance source between 2V and
+V
DD
. The value of the reference voltage directly sets the
input range of the converter.
The analog input (X, Y, and Z parallel coordinates, auxiliary
inputs, battery voltage, and chip temperature) to the con-
verter is provided via a multiplexer. A unique configuration of
low on-resistance switches allows an unselected A/D con-
verter input channel to provide power, and an accompanying
pin to provide ground for an external device. By maintaining
FIGURE 1. Basic Operation of the TSC2003.
a differential input to the converter, and a differential refer-
ence architecture, it is possible to negate the switch's on-
resistance error (should this be a source of error for the
particular measurement).
ANALOG INPUT
See Figure 2 for a block diagram of the input multiplexer on
the TSC2003, the differential input of the A/D converter, and
the converter's differential reference.
When the converter enters the Hold mode, the voltage
difference between the +IN and �IN inputs (see Figure 2) is
captured on the internal capacitor array. The input current on
the analog inputs depends on the conversion rate of the
device. During the sample period, the source must charge
the internal sampling capacitor (typically 25pF). After the
capacitor has been fully charged, there is no further input
current. The amount of charge transfer from the analog
source to the converter is a function of conversion rate.
1
2
3
4
5
6
7
8
+V
DD
X+
Y+
X�
Y�
GND
V
BAT1
V
BAT2
IN1
IN2
A0
A1
SCL
SDA
PENIRQ
V
REF
16
15
14
13
12
11
10
9
TSC2003
Serial Clock
Serial Data
Pen Interrupt
+
1
�
F
to
10
�
F
(Optional)
+2.7V to +5V
Touch
Screen
0.1
�
F
1
�
F
to
10
�
F
(Optional)
0.1
�
F
+
Main
Battery
Secondary
Battery
1.2k
50k
1.2k
Auxiliary Input
Auxiliary Input
Voltage
Regulator

TSC2003
10
SBAS162D
www.ti.com
INTERNAL REFERENCE
The TSC2003 has an internal 2.5V voltage reference that
can be turned ON or OFF with the power-down control bits,
PD0 and PD1 (see Table II and Figure 3). The internal
reference is powered down when power is first applied to the
device.
The internal reference voltage is only used in the
single-ended reference mode for battery monitoring, tem-
perature measurement, and for measuring the auxiliary in-
put. Optimal touch screen performance is achieved when
using a ratiometric conversion; thus, all touch screen mea-
surements are done automatically in the differential mode.
Buffer
Band
Gap
Reference
Power Down
To
CDAC
Optional
V
REF
FIGURE 3. Simplified Diagram of the Internal Reference.
FIGURE 2. Simplified Diagram of the Analog Input.
Converter
�REF
+REF
+IN
�IN
V
BAT1
IN1
Battery
On
IN2
GND
C2-C0
(Shown 101
B
)
2.5V
Reference
Ref ON/OFF
C3
(Shown HIGH)
X+
X�
+V
DD
TEMP1
PENIRQ
Y+
Y�
V
REF
TEMP0
7.5k
V
BAT2
7.5k
2.5k
Battery
On
2.5k

TSC2003
11
SBAS162D
www.ti.com
REFERENCE MODE
There is a critical item regarding the reference when making
measurements while the switch drivers are ON. For this
discussion, it is useful to consider the basic operation of the
TSC2003 (see Figure 1). This particular application shows
the device being used to digitize a resistive touch screen. A
measurement of the current Y position of the pointing device
is made by connecting the X+ input to the A/D converter,
turning on the Y+ and Y� drivers, and digitizing the voltage
on X+, as shown in Figure 4. For this measurement, the
resistance in the X+ lead does not affect the conversion; it
does, however, affect the settling time, but the resistance is
usually small enough that this is not a concern. However,
since the resistance between Y+ and Y� is fairly low, the
on-resistance of the Y drivers does make a small difference.
Under the situation outlined so far, it would not be possible
to achieve a 0V input or a full-scale input regardless of where
the pointing device is on the touch screen because some
voltage is lost across the internal switches. In addition, the
internal switch resistance is unlikely to track the resistance of
the touch screen, providing an additional source of error.
This situation is remedied, as shown in Figure 5, by using the
differential mode: the +REF and �REF inputs are connected
directly to Y+ and Y�, respectively. This makes the A/D
converter ratiometric. The result of the conversion is always a
percentage of the external reference, regardless of how it
changes in relation to the on-resistance of the internal switches.
REFERENCE INPUT
The voltage difference between +REF and �REF (see
Figure 2) sets the analog input range. The TSC2003 will
operate with a reference in the range of 2V to +V
DD
. There are
several critical items concerning the reference input and its
wide-voltage range. As the reference voltage is reduced, the
analog voltage weight of each digital output code is also
reduced. This is often referred to as the LSB (Least Significant
Bit) size, and is equal to the reference voltage divided by 4096
(256 if in 8-bit mode). Any Offset or Gain error inherent in the
A/D converter will appear to increase, in terms of LSB size, as
the reference voltage is reduced. For example, if the offset of
a given converter is 2LSBs with a 2.5V reference, it will
typically be 2.5LSBs with a 2V reference. In each case, the
actual offset of the device is the same, 1.22mV. With a lower
reference voltage, more care must be taken to provide a clean
layout including adequate bypassing, a clean (low-noise, low-
ripple) power supply, a low-noise reference (if an external
reference is used), and a low-noise input signal.
The voltage into the V
REF
input is not buffered, and directly
drives the Capacitor Digital-to-Analog Converter (CDAC)
portion of the TSC2003. Therefore, the input current is very
low, typically < 6
�
A.
FIGURE 4. Simplified Diagram of Single-Ended Reference.
FIGURE 5. Simplified Diagram of Differential Reference (Y
Switches Enabled, X+ is Analog Input).
Converter
+IN
+REF
Y+
+V
DD
X+
Y�
GND
�REF
�IN
Converter
+IN
+REF
Y+
+V
DD
V
REF
X+
Y�
GND
�REF
�IN

TSC2003
12
SBAS162D
www.ti.com
the Temperature Coefficient (TC) of this voltage is very
consistent at �2.1mV/
�
C. During the final test of the end
product, the diode voltage would be stored at a known room
temperature, in memory, for calibration purposes by the user.
The result is an equivalent temperature measurement reso-
lution of 0.3
�
C/LSB.
Differential reference mode always uses the supply voltage,
through the drivers, as the reference voltage for the A/D
converter. V
REF
cannot be used as the reference voltage in
differential mode.
It is possible to use a high-precision reference on V
REF
in
single-ended reference mode for measurements which do
not need to be ratiometric (i.e., battery voltage, temperature
measurement, etc.). In some cases, it could be possible to
power the converter directly from a precision reference. Most
references can provide enough power for the TSC2003, but
they might not be able to supply enough current for the
external load, such as a resistive touch screen.
TOUCH SCREEN SETTLING
In some applications, external capacitors may be required
across the touch screen for filtering noise picked up by the
touch screen (i.e., noise generated by the LCD panel or
backlight circuitry). These capacitors will provide a low-pass
filter to reduce the noise, but they will also cause a settling
time requirement when the panel is touched. The settling
time will typically show up as a gain error. The problem is that
the input and/or reference has not settled to its final steady-
state value prior to the A/D converter sampling the input(s),
and providing the digital output. Additionally, the reference
voltage may still be changing during the measurement cycle.
To resolve these settling time problems, the TSC2003 can be
commanded to turn on the drivers only without performing a
conversion (see Table I). Time can then be allowed before
the command is issued to perform a conversion. Generally,
the time it takes to communicate the conversion command
over the I
2
C bus is adequate for the touch screen to settle.
TEMPERATURE MEASUREMENT
In some applications, such as battery recharging, a measure-
ment of ambient temperature is required. The temperature
measurement technique used in the TSC2003 relies on the
characteristics of a semiconductor junction operating at a
fixed current level to provide a measurement of the tempera-
ture of the TSC2003 chip. The forward diode voltage (V
BE
)
has a well-defined characteristic versus temperature. The
temperature can be predicted in applications by knowing the
25
�
C value of the V
BE
voltage and then monitoring the delta
of that voltage as the temperature changes. The TSC2003
offers two modes of temperature measurement.
The first mode requires calibrations at a known temperature,
but only requires a single reading to predict the ambient
temperature. A diode is used during this measurement cycle.
The voltage across the diode is connected through the MUX
for digitizing the diode forward bias voltage by the A/D
converter with an address of C3 = 0, C2 = 0, C1 = 0, and
C0 = 0 (see Table I and Figure 6 for details). This voltage is
typically 600mV at +25
�
C, with a 20
�
A current through it. The
absolute value of this diode voltage can vary a few millivolts;
A/D
Converter
MUX
X+
Temperature Select
TEMP0
TEMP1
FIGURE 6. Functional Block Diagram of Temperature Mea-
surement Mode.
The second mode does not require a test temperature
calibration, but uses a two-measurement method to eliminate
the need for absolute temperature calibration and for achiev-
ing 2
�
C/LSB accuracy. This mode requires a second conver-
sion with an address of C3 = 0, C2 = 1, C1 = 0, and C0 = 0,
with an 91 times larger current. The voltage difference
between the first and second conversion using 91 times the
bias current will be represented by kT/q � 1n (N), where N is
the current ratio = 91, k = Boltzmann's constant (1.38054 �
10
�23
electrons volts/degrees Kelvin), q = the electron charge
(1.602189 � 10
�19
C), and T = the temperature in degrees
Kelvin. This mode can provide improved absolute tempera-
ture measurement over the first mode, but at the cost of less
resolution (1.6
�
C/LSB). The equation to solve for
�
K is:
�
�
�
K =
q
k 1n(N)
V
(1)
where:
V
V(I ) � V(I ) (in mV)
K
2.573 V K/mV
C
2.573
V(mV) � 273 K
91
1
=
=
=
�
o
o
o
o
NOTE: The bias current for each diode temperature mea-
surement is only turned ON during the acquisition mode,
and, therefore, does not add any noticeable increase in
power, especially if the temperature measurement only oc-
curs occasionally.

TSC2003
13
SBAS162D
www.ti.com
BATTERY MEASUREMENT
An added feature of the TSC2003 is the ability to monitor the
battery voltage on the other side of the voltage regulator
(DC/DC converter), as shown in Figure 7. The battery voltage
can vary from 0.5V to 6V, while the voltage regulator main-
tains the voltage to the TSC2003 at 2.7V, 3.3V, etc. The input
voltage (V
BAT1
or V
BAT2
) is divided down by 4 so that a 6.0V
battery voltage is represented as 1.5V to the A/D converter.
The simplifies the multiplexer and control logic. In order to
minimize the power consumption, the divider is only ON
during the sample period which occurs after control bits C3
= 0, C2 = 0, C1 = 0, and C0 = 1 (V
BAT1
) or C3 = 0, C2 = 1,
C1 = 0, and C0 = 1 (V
BAT2
) are received. See Tables I and
II for the relationship between the control bits and configura-
tion of the TSC2003.
V
DD
V
BAT
7.5k
2.5k
DC/DC
Converter
Battery
0.5V
to
6.0V
0.125V to 1.5V
2.7V
+
A/D
Converter
FIGURE 7. Battery Measurement Functional Block Diagram.
X-Position
Measure X-Position
Measure Z
1
-Position
Touch
X+
Y+
X�
Y�
Z
1
-Position
Touch
X+
Y+
Y�
X�
Measure Z
2
-Position
Z
2
-Position
Touch
X+
Y+
Y�
X�
FIGURE 8. Pressure Measurement Block Diagrams.
PRESSURE MEASUREMENT
Measuring touch pressure can also be done with the TSC2003.
To determine pen or finger touch, the pressure of the "touch"
needs to be determined. Generally, it is not necessary to
have high accuracy for this test, therefore, the 8-bit resolution
mode is recommended. However, calculations will be shown
with the 12-bit resolution mode. There are several different
ways of performing this measurement--the TSC2003 sup-
ports two methods.
The first method requires knowing the X-Plate resistance,
measurement of the X-Position, and two additional
cross-panel measurements (Z
2
and Z
1
) of the touch screen,
as shown in Figure 8. Using Equation 2 will calculate the
touch resistance:
R
R
X Position
4096
Z
Z
� 1
TOUCH
X Plate
2
1
=
� -
-
(2)
The second method requires knowing both the X-Plate and
Y-Plate resistance, measurement of X-Position and Y-Posi-
tion, and Z
1
. Equation 3 calculates the touch resistance using
the second method:
R
R
X
Position
4096
4096
Z
� 1
�R
Y
Position
4096
TOUCH
X Plate
1
Y Plate
=
-
�
-
-
�
-
1�
(3)
DIGITAL INTERFACE
The TSC2003 supports the I
2
C serial bus and data transmis-
sion protocol in all three defined modes: standard, fast, and
high-speed. A device that sends data onto the bus is defined
as a transmitter, and a device receiving data as a receiver.
The device that controls the message is called a
master. The
devices that are controlled by the master are
slaves. The bus
must be controlled by a master device which generates the

TSC2003
14
SBAS162D
www.ti.com
FIGURE 9. I
2
C Bus Protocol.
SDA
SCL
Slave Address
Repeated If More Bytes Are Transferred
R/W
Direction
Bit
Acknowledgement
Signal from
Receiver
Acknowledgement
Signal from
Receiver
START
Condition
1
2
7
6
8
9
1
2
3-7
8
9
ACK
ACK
STOP Condition
or Repeated
START Condition
serial clock (SCL), controls the bus access, and generates
the START and STOP conditions. The TSC2003 operates as
a slave on the I
2
C bus. Connections to the bus are made via
the open-drain I/O lines SDA and SDL.
The following bus protocol has been defined, as shown in
Figure 9:
�
Data transfer may be initiated only when the bus is not busy.
�
During data transfer, the data line must remain stable
whenever the clock line is HIGH. Changes in the data line
while the clock line is HIGH will be interpreted as control
signals.
Accordingly, the following bus conditions have been defined:
Bus Not Busy: Both data and clock lines remain HIGH.
Start Data Transfer: A change in the state of the data line,
from HIGH to LOW, while the clock is HIGH defines a START
condition.
Stop Data Transfer: A change in the state of the data line,
from LOW to HIGH, while the clock line is HIGH defines a
STOP condition.
Data Valid: The state of the data line represents valid data
when, after a START condition, the data line is stable for the
duration of the HIGH period of the clock signal. There is one
clock pulse per bit of data.
Each data transfer is initiated with a START condition and
terminated with a STOP condition. The number of data bytes
transferred between START and STOP conditions is not
limited, and is determined by the master device. The informa-
tion is transferred byte-wise, and each receiver acknowl-
edges with a ninth-bit.
Within the I
2
C bus specifications, a standard mode (100kHz
clock rate), a fast mode (400kHz clock rate), and a
high-speed mode (3.4MHz clock rate) are defined. The
TSC2003 works in all three modes.
Acknowledge: Each receiving device, when accessed, is
obliged to generate an acknowledge after the reception of
each byte. The master device must generate an extra clock
pulse, which is associated with this acknowledge bit.
A device that acknowledges must pull down the SDA line during
the acknowledge clock pulse in such a way that the SDA line is
stable LOW during the HIGH period of the acknowledge clock
pulse. Of course, setup and hold times must be taken into account.
A master must signal an end of data to the slave by not generating
an acknowledge bit on the last byte that has been clocked out of
the slave. In this case, the slave must leave the data line HIGH to
enable the master to generate the STOP condition.
Figure 9 details how data transfer is accomplished on the I
2
C
bus. Depending upon the state of the R/W bit, two types of
data transfer are possible:
�
Data transfer from a master transmitter to a slave
receiver. The first byte transmitted by the master is the
slave address. Next follows a number of data bytes. The
slave returns an acknowledge bit after the slave address
and each received byte.
�
Data transfer from a slave transmitter to a master
receiver. The first byte (the slave address) is transmitted
by the master. The slave then returns an acknowledge bit.
Next, a number of data bytes are transmitted by the slave
to the master. The master returns an acknowledge bit
after all received bytes other than the last one. At the end
of the last received byte, a `not acknowledge' is returned.
The master device generates all of the serial clock pulses
and the START and STOP conditions. A transfer is ended
with a STOP condition or a repeated START condition. Since
a repeated START condition is also the beginning of the next
serial transfer, the bus will not be released.
The TSC2003 may operate in the following two modes:
�
Slave Receiver Mode: Serial data and clock are received
through SDA and SCL. After each byte is received, an
acknowledge bit is transmitted. START and STOP condi-
tions are recognized as the beginning and end of a serial
transfer. Address recognition is performed by hardware
after reception of the slave address and direction bit.
�
Slave Transmitter Mode: The first byte (the slave ad-
dress) is received and handled as in the slave receiver
mode. However, in this mode the direction bit will indicate
that the transfer direction is reversed. Serial data is
transmitted on SDA by the TSC2003 while the serial clock
is input on SCL. START and STOP conditions are recog-
nized as the beginning and end of a serial transfer.

TSC2003
15
SBAS162D
www.ti.com
Address Byte
The address byte, as shown in Figure 10, is the first byte
received following the START condition from the master
device. The first five bits (MSBs) of the slave address are
factory preset to 10010. The next two bits of the address byte
are the device select bits: A1 and A0. Input pins (A1-A0) on
the TSC2003 determine these two bits of the device address
for a particular TSC2003. Therefore, a maximum of four
devices with the same preset code can be connected on the
same bus at one time.
FIGURE 10. Address Byte.
1
0
0
1
0
A1
A0
R/W
MSB
LSB
FIGURE 11. Command Byte.
C3
C2
C1
C0
PD1
PD0
M
X
MSB
LSB
C3
C2
C1
C0
FUNCTION
INPUT to ADC
X-DRIVERS
Y-DRIVERS
REFERENCE MODE
0
0
0
0
Measure TEMP0
TEMP0
OFF
OFF
Single-Ended
0
0
0
1
Measure V
BAT1
V
BAT1
OFF
OFF
Single-Ended
0
0
1
0
Measure IN1
IN1
OFF
OFF
Single-Ended
0
0
1
1
Reserved
�
�
�
Single-Ended
0
1
0
0
Measure TEMP1
TEMP1
OFF
OFF
Single-Ended
0
1
0
1
Measure V
BAT2
V
BAT2
OFF
OFF
Single-Ended
0
1
1
0
Measure IN2
IN2
OFF
OFF
Single-Ended
0
1
1
1
Reserved
�
�
�
Single-Ended
1
0
0
0
Activate X� Drivers
�
ON
OFF
Differential
1
0
0
1
Activate Y� Drivers
�
OFF
ON
Differential
1
0
1
0
Activate Y+, X� Drivers
�
X� ON
Y+ ON
Differential
1
0
1
1
Reserved
�
�
�
Differential
1
1
0
0
Measure X Position
Y+
ON
OFF
Differential
1
1
0
1
Measure Y Position
X+
OFF
ON
Differential
1
1
1
0
Measure Z
1
Position
X+
X� ON
Y+ ON
Differential
1
1
1
1
Measure Z
2
Position
Y�
X� ON
Y+ ON
Differential
TABLE I. Possible Input Configurations.
The internal reference voltage can be turned ON or OFF
independently of the A/D converter. This can allow extra time
for the internal reference voltage to settle to its final value prior
to making a conversion. Make sure to allow this extra wake-
up time if the internal reference was powered down. Also note
that the status of the internal reference power down is latched
into the part (internally) when a STOP or repeated START
occurs at the end of a command byte (see Figures 12 and 14).
Therefore, in order to turn the internal reference OFF, an
additional write to the TSC2003, with PD1 = 0, is required after
the channel has been converted.
It is recommended to set PD0 = 0 in each command byte to get
the lowest power consumption possible. If multiple X-, Y-, and
Z-position measurements will be done one right after another,
such as when averaging, PD0 =1 will leave the touch screen
drivers on at the end of each conversion cycle.
�
M: Mode bit. If M is 0, the TSC2003 is in 12-bit mode. If
M is 1, 8-bit mode is selected.
�
X: Don't care.
The A1-A0 Address Inputs can be connected to V
DD
or digital
ground. The last bit of the address byte (R/W) defines the
operation to be performed. When set to a "1", a read
operation is selected; when set to a "0", a write operation is
selected. Following the START condition, the TSC2003
monitors the SDA bus and checks the device type identifier
being transmitted. Upon receiving the 10010 code, the ap-
propriate device select bits, and the R/W bit, the slave device
outputs an acknowledge signal on the SDA line.
Command Byte
The TSC2003's operating mode is determined by a com-
mand byte, which is shown in Figure 11.
PD1
PD0
PENIRQ
DESCRIPTION
0
0
Enabled
Power-Down Between Conversions
0
1
Disabled
Internal reference OFF, ADC
(1)
ON
1
0
Enabled
Internal reference ON, ADC
(1)
OFF
1
1
Disabled
Internal reference ON, ADC
(1)
ON
NOTE: (1) ADC = Analog-to Digital Converter.
TABLE II. Power-Down Bit Functions.
The bits in the device command byte are defined as follows:
�
C3-C0: Configuration bits. These bits set the input multi-
plexer address and functions that the TSC2003 will per-
form, as shown in Table I.
�
PD1-PD0: Power-down bits. These two bits select the
power-down mode that the TSC2003 will be in after the
current command completes, as shown in Table II.
When the TSC2003 powers up, the power-down mode bits
need to be written to ensure that the part is placed into the
desired mode to achieve lowest power. Therefore, immedi-
ately after power-up, a command byte should be sent which
sets PD1 = PD0 = 0, so that the device will be in the lowest
power mode, powering down between conversions.
Start A Conversion/Write Cycle
A Conversion/Write Cycle begins when the master issues the
address byte containing the slave address of the TSC2003,
with the eighth bit equal to a 0 (R/W = 0), as shown in Figure
10. Once the eighth bit has been received, and the address
matches the A1-A0 address input pin setting, the TSC2003
issues an acknowledge.

TSC2003
16
SBAS162D
www.ti.com
Once the master receives the acknowledge bit from the
TSC2003, the master writes the command byte to the slave
(see Figure 11). After the command byte is received by the
slave, the slave issues another acknowledge bit. The master
then ends the Write Cycle by issuing a repeated START or
a STOP condition, as shown in Figure 12.
If the master sends additional command bytes after the initial
byte, before sending a STOP or repeated START condition,
the TSC2003 will not acknowledge those bytes.
The input multiplexer for the A/D converter has its channel
selected when bits C3 through C0 are clocked in. If the
selected channel is an X-,Y-, or Z-position measurement, the
appropriate drivers will turn on once the acquisition period
begins.
When R/W = 0, the input sample acquisition period starts on
the falling edge of SCL once the C0 bit of the command byte
has been latched, and ends when a STOP or repeated
START condition has been issued. A/D conversion starts
immediately after the acquisition period. The multiplexer
inputs to the A/D converter are disabled once the conversion
period starts. However, if an X-, Y-, or Z-position is being
measured, the respective touch screen drivers remain on
during the conversion period. A complete Write Cycle is
shown in Figure 12.
SDA
SCL
1
0
0
1
0
A1
A0
R/W
0
0
C3
C2
C1
C0 PD1 PD0
M
X
0
START
TSC2003
ACK
TSC2003
ACK
Address Byte
Command Byte
Acquisition
Conversion
STOP or
REPEATED START
FIGURE 12. Complete I
2
C Serial Write Transmission.
Read A Conversion/Read Cycle
For best performance, the I
2
C bus should remain in an idle
state while an A/D conversion is taking place. This prevents
digital clock noise from affecting the bit decisions being made
by the TSC2003. The master should wait for at least 10
�
s
before attempting to read data from the TSC2003 to realize
this best performance. However, the master does not need
to wait for a completed conversion before beginning a read
from the slave, if full 12-bit performance is not necessary.
Data access begins with the master issuing a START condition
followed by the address byte (see Figure 10) with R/W = 1.
Once the eighth bit has been received, and the address
matches, the slave issues an acknowledge. The first byte of
serial data will follow (D11-D4, MSB first).
After the first byte has been sent by the slave, it releases the
SDA line for the master to issue an acknowledge. The slave
responds with the second byte of serial data upon receiving
the acknowledge from the master (D3-D0, followed by four 0
bits). The second byte is followed by a NOT acknowledge bit
(ACK = 1) from the master to indicate that the last data byte
has been received. If the master acknowledges the second
data byte, then the data will repeat on subsequent reads with
ACKs between bytes. This is true in both 12-bit and 8-bit
mode. The master will then issue a STOP condition, which
ends the Read Cycle, as shown in Figure 13.
SDA
SCL
1
0
0
1
0
A1 A0
R/W
1
0
D11 D10
D9 D8 D7 D6 D5 D4
0
D3
D2
D1
D0
0
0
0
0
1
START
TSC2003
ACK
MASTER
ACK
MASTER
NACK
STOP or
REPEATED START
Address Byte
Date Byte 1
Date Byte 2
FIGURE 13. Complete I
2
C Serial Read Transmission.

TSC2003
17
SBAS162D
www.ti.com
I
2
C High-Speed Operation
The TSC2003 can operate with high-speed I
2
C masters. To
do so, the simple resistor pull-up on SCL must be changed
to the active pull-up, as recommended in the I
2
C specification.
The I
2
C bus will be operating in standard or fast mode
initially. Following a START condition, the master will send
the code 00001xxx, which the slave will not acknowledge. At
this point, the bus is now operating in high-speed mode. The
bus will remain in high-speed mode until a STOP condition
occurs. Therefore, to maximize throughput only repeated
STARTs should be used to separate transactions.
Since the TSC2003 may not have completed a conversion
before a read to the part can be requested, the TSC2003 is
capable of stretching the clock until the converted data is
stored in its internal shift register. Once the data is latched,
the TSC2003 will release the clock line so that the master
can receive the converted data. A complete high-speed
Conversion Cycle is shown in Figure 14.
Data Format
The TSC2003 output data is in Straight Binary format, as
shown in Figure 15. This shows the ideal output code for the
given input voltage, and does not include the effects of
offset, gain, or noise.
8-Bit Conversion
The TSC2003 provides an 8-bit conversion mode (M = 1)
that can be used when faster throughput is needed, and the
digital result is not as critical (for example, measuring pres-
sure). By switching to the 8-bit mode, a conversion result can
be read by transferring only one data byte.
This shortens each conversion by four bits and reduces data
transfer time which results in fewer clock cycles and provides
lower power consumption.
D11
D10
D9
D8
D7
D6
D5
D4
A
D3
D0
N
P
S
0
0
0
0
1
X
X
X
Sr
1
0
0
1
0
A1
A0
W
A
C3
C2
C1
C0
PD1
PD0
M
X
A
Sr
1
0
0
1
0
A1
A0
R
A
SCLH is stretched LOW until A/D Converter is finished converting data.
N
D2
D1
0
0
0
0
F/S Mode
HS-Mode Enabled
A/D Converter Power-Down Mode
A/D Converter Powers Up and Begins Sampling
Fixed Address Part
Programmable
A/D Converter Stops Sampling and Begins Conversion Using Internal Clock
A/D Converter Goes Into Power-Down Mode After Finishing Conversion (If PD0 = 0)
Exit HS-Mode and Enter F/S Mode
16 Bits + Ack
S = START
Sr = REPEATED START
P = STOP
= Master Controls Bus
= Slave Controls Bus
FIGURE 14. High-Speed I
2
C Mode Conversion Cycle.
Output Code
0V
FS = Full-Scale Voltage = V
REF
(1)
1LSB = V
REF
(1)
/4096
FS � 1LSB
11...111
11...110
11...101
00...010
00...001
00...000
1LSB
NOTES: (1) Reference voltage at converter: +REF � (�REF). See Figure 2.
(2) Input voltage at converter, after multiplexer: +IN � (�IN). See Figure 2
Input Voltage
(2)
(V)
FIGURE 15. Ideal Input Voltages and Output Codes.
LAYOUT
The following layout suggestions should provide optimum
performance from the TSC2003. However, many portable
applications have conflicting requirements concerning power,
cost, size, and weight. In general, most portable devices
have fairly "clean" power and grounds because most of the
internal components are very low power. This situation would
mean less bypassing for the converter's power, and less
concern regarding grounding. Still, each situation is unique,
and the following suggestions should be reviewed carefully.

TSC2003
18
SBAS162D
www.ti.com
PENIRQ output is HIGH. While in the power-down mode, with
PD0 = 0, the Y� driver is ON and connected to GND, and the
PENIRQ output is connected to the X+ input. When the panel
is touched, the X+ input is pulled to ground through the touch
screen, and PENIRQ output goes LOW due to the current path
through the panel to GND, initiating an interrupt to the processor.
During the measurement cycle for X-, Y-, and Z-Position, the X+
input will be disconnected from the PENIRQ pull-down transis-
tor to eliminate any leakage current from the pull-up resistor to
flow through the touch screen, thus causing no errors.
In addition to the measurement cycles for X-, Y-, and Z-
position, commands which activate the X-drivers, Y-drivers, Y+
and X-drivers without performing a measurement also discon-
nect the X+ input from the PENIRQ pull-down transistor and
disable the pen-interrupt output function regardless of the value
of the PD0 bit. Under these conditions, the PENIRQ output will
be forced LOW. Furthermore, if the last command byte written
to the TSC2003 contains PD0 = 1, the pen-interrupt output
function will be disabled and will not be able to detect when the
panel is touched. In order to re-enable the pen-interrupt output
function under these circumstances, a command byte needs to
be written to the TSC2003 with PD0 = 0.
Once the bus master sends the address byte with R/W = 0
(see Figure 10) and the TSC2003 sends an acknowledge,
the pen-interrupt function is disabled. If the command which
follows the address byte has PD0 = 0, then the pen-interrupt
function will be enabled at the end of a conversion. This is
approximately 10
�
s (12-bit mode) or 7
�
s (8-bit mode) after
the TSC2003 receives a STOP/START condition following
the reception of a command byte (see Figures 12 and 14 for
further details of when the conversion cycle begins).
In both cases listed above, it is recommended that the
master processor mask the interrupt which the PENIRQ is
associated with whenever the host writes to the TSC2003.
This will prevent false triggering of interrupts when the
PENIRQ line is disabled in the cases listed above.
For optimum performance, care should be taken with the
physical layout of the TSC2003 circuitry. The basic SAR archi-
tecture is sensitive to glitches or sudden changes on the power
supply, reference, ground connections, and digital inputs that
occur just prior to latching the output of the analog comparator.
Therefore, during any single conversion for an n-bit SAR
converter, there are n "windows" in which large external tran-
sient voltages can easily affect the conversion result. Such
glitches might originate from switching power supplies, nearby
digital logic, and high-power devices. The degree of error in the
digital output depends on the reference voltage, layout, and the
exact timing of the external event. The error can change if the
external event changes in time with respect to the SCL input.
With this in mind, power to the TSC2003 should be clean and
well bypassed. A 0.1
�
F ceramic bypass capacitor should be
placed as close to the device as possible. In addition, a 1
�
F
to 10
�
F capacitor may also be needed if the impedance of
the connection between +V
DD
and the power supply is high.
A bypass capacitor is generally not needed on the V
REF
pin
because the internal reference is buffered by an internal op
amp. If an external reference voltage originates from an op
amp, make sure that it can drive any bypass capacitor that
is used without oscillation.
The TSC2003 architecture offers no inherent rejection of noise
or voltage variation in regards to using an external reference
input. This is of particular concern when the reference input is
tied to the power supply. Any noise and ripple from the supply
will appear directly in the digital results. While high-frequency
noise can be filtered out, voltage variation due to line fre-
quency (50Hz or 60Hz) can be difficult to remove.
The GND pin should be connected to a clean ground point. In
many cases, this will be the "analog" ground. Avoid connec-
tions which are too near the grounding point of a microcontroller
or digital signal processor. If needed, run a ground trace
directly from the converter to the power-supply entry point. The
ideal layout will include an analog ground plane dedicated to
the converter and associated analog circuitry.
In the specific case of use with a resistive touch screen, care
should be taken with the connection between the converter
and the touch screen. Since resistive touch screens have
fairly low resistance, the interconnection should be as short
and robust as possible. Longer connections will be a source
of error, much like the on-resistance of the internal switches.
Likewise, loose connections can be a source of error when
the contact resistance changes with flexing or vibrations.
As indicated previously, noise can be a major source of error in
touch screen applications (e.g., applications that require a backlit
LCD panel). This EMI noise can be coupled through the LCD panel
to the touch screen and cause "flickering" of the converted data.
Several things can be done to reduce this error, such as utilizing a
touch screen with a bottom-side metal layer connected to ground.
This will couple the majority of noise to ground. Additionally, filtering
capacitors from Y+, Y�, X+, and X� to ground can also help.
PENIRQ
OUTPUT
The pen-interrupt output function is shown in Figure 16. By
connecting a pull-up resistor to V
DD
(typically 100k
), the
PENIRQ
V
DD
10k
30k
to 100k
ON
Y+ or X+ drivers on,
or TEMP0, TEMP1
measurements activated
Y+
X+
Y�
TEMP0
TEMP1
TEMP
DIODE
HIGH except
when TEMP0,
TEMP1 activated
V
DD
V
DD
FIGURE 16. PENIRQ Functional Block Diagram.

PACKAGING INFORMATION
ORDERABLE DEVICE
STATUS(1)
PACKAGE TYPE
PACKAGE DRAWING
PINS
PACKAGE QTY
TSC2003IPW
ACTIVE
TSSOP
PW
16
94
TSC2003IPWR
ACTIVE
TSSOP
PW
16
2500
TSC2003IZQCR
ACTIVE
BGA MICROSTAR
JUNIOR
ZQC
48
2500
(1) The marketing status values are defined as follows:
ACTIVE: Product device recommended for new designs.
LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.
NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in
a new design.
PREVIEW: Device has been announced but is not in production. Samples may or may not be available.
OBSOLETE: TI has discontinued the production of the device.
PACKAGE OPTION ADDENDUM
www.ti.com
25-Nov-2004


MECHANICAL DATA
MTSS001C � JANUARY 1995 � REVISED FEBRUARY 1999
POST OFFICE BOX 655303
�
DALLAS, TEXAS 75265
PW (R-PDSO-G**)
PLASTIC SMALL-OUTLINE PACKAGE
14 PINS SHOWN
0,65
M
0,10
0,10
0,25
0,50
0,75
0,15 NOM
Gage Plane
28
9,80
9,60
24
7,90
7,70
20
16
6,60
6,40
4040064/F 01/97
0,30
6,60
6,20
8
0,19
4,30
4,50
7
0,15
14
A
1
1,20 MAX
14
5,10
4,90
8
3,10
2,90
A MAX
A MIN
DIM
PINS **
0,05
4,90
5,10
Seating Plane
0
�
� 8
�
NOTES: A. All linear dimensions are in millimeters.
B. This drawing is subject to change without notice.
C. Body dimensions do not include mold flash or protrusion not to exceed 0,15.
D. Falls within JEDEC MO-153

IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications,
enhancements, improvements, and other changes to its products and services at any time and to discontinue
any product or service without notice. Customers should obtain the latest relevant information before placing
orders and should verify that such information is current and complete. All products are sold subject to TI's terms
and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in
accordance with TI's standard warranty. Testing and other quality control techniques are used to the extent TI
deems necessary to support this warranty. Except where mandated by government requirements, testing of all
parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for
their products and applications using TI components. To minimize the risks associated with customer products
and applications, customers should provide adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right,
copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process
in which TI products or services are used. Information published by TI regarding third-party products or services
does not constitute a license from TI to use such products or services or a warranty or endorsement thereof.
Use of such information may require a license from a third party under the patents or other intellectual property
of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of information in TI data books or data sheets is permissible only if reproduction is without
alteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproduction
of this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable for
such altered documentation.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that
product or service voids all express and any implied warranties for the associated TI product or service and
is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.
Following are URLs where you can obtain information on other Texas Instruments products and application
solutions:
Products
Applications
Amplifiers
amplifier.ti.com
Audio
www.ti.com/audio
Data Converters
dataconverter.ti.com
Automotive
www.ti.com/automotive
DSP
dsp.ti.com
Broadband
www.ti.com/broadband
Interface
interface.ti.com
Digital Control
www.ti.com/digitalcontrol
Logic
logic.ti.com
Military
www.ti.com/military
Power Mgmt
power.ti.com
Optical Networking
www.ti.com/opticalnetwork
Microcontrollers
microcontroller.ti.com
Security
www.ti.com/security
Telephony
www.ti.com/telephony
Video & Imaging
www.ti.com/video
Wireless
www.ti.com/wireless
Mailing Address:
Texas Instruments
Post Office Box 655303 Dallas, Texas 75265
Copyright
2004, Texas Instruments Incorporated