 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: AD627 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
a
AD627
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700
World Wide Web Site: http://www.analog.com
Fax: 781/326-8703
© Analog Devices, Inc., 1999
Micropower, Single and Dual Supply
Rail-to-Rail Instrumentation Amplifier
FUNCTIONAL BLOCK DIAGRAM
8-Lead Plastic DIP (N) and SOIC (R)
8
7
6
5
1
2
3
4
R
G
≠IN
+IN
≠V
S
R
G
+V
S
OUTPUT
REF
AD627
FEATURES
Micropower, 85 A Max Supply Current
Wide Power Supply Range (+2.2 V to 18 V)
Easy to Use
Gain Set with One External Resistor
Gain Range 5 (No Resistor) to 1,000
Higher Performance than Discrete Designs
Rail-to-Rail Output Swing
High Accuracy DC Performance
0.10% Gain Accuracy (G = 5) (AD627A)
10 ppm Gain Drift (G = 5)
125 V Max Input Offset Voltage (AD627B)
200 V Max Input Offset Voltage (AD627A)
1 V/ C Max Input Offset Voltage Drift (AD627B)
3 V/ C Max Input Offset Voltage Drift (AD627A)
10 nA Max Input Bias Current
Noise: 38 nV/
Hz RTI Noise @ 1 kHz (G = 100)
Excellent AC Specifications
77 dB Min CMRR (G = 5) (AD627A)
83 dB Min CMRR (G = 5) (AD627B)
80 kHz Bandwidth (G = 5)
135 s Settling Time to 0.01% (G = 5, 5 V Step)
APPLICATIONS
4 mA-to-20 mA Loop Powered Applications
Low Power Medical Instrumentation--ECG, EEG
Transducer Interfacing
Thermocouple Amplifiers
Industrial Process Controls
Low Power Data Acquisition
Portable Battery Powered Instruments
PRODUCT DESCRIPTION
The AD627 is an integrated, micropower, instrumentation
amplifier that delivers rail-to-rail output swing on single and
dual (+2.2 V to
±
18 V) supplies. The AD627 provides the user
with excellent ac and dc specifications while operating at only
85
µ
A max.
The AD627 offers superior user flexibility by allowing the user
to set the gain of the device with a single external resistor, and
by conforming to the 8-lead industry standard pinout configura-
tion. With no external resistor, the AD627 is configured for a
gain of 5. With an external resistor, it can be programmed for
gains of up to 1000.
Wide supply voltage range (+2.2 V to
±
18 V), and micropower
current consumption make the AD627 a perfect fit for a wide
range of applications. Single supply operation, low power con-
sumption and rail-to-rail output swing make the AD627 ideal
for battery powered applications. Its rail-to-rail output stage
maximizes dynamic range when operating from low supply
voltages. Dual supply operation (
±
15 V) and low power con-
sumption make the AD627 ideal for industrial applications,
including 4 mA-to-20 mA loop-powered systems.
The AD627 does not compromise performance, unlike other
micropower instrumentation amplifiers. Low voltage offset,
offset drift, gain error, and gain drift keep dc errors to a mini-
mum in the users system. The AD627 also holds errors over
frequency to a minimum by providing excellent CMRR over
frequency. Line noise, as well as line harmonics, will be rejected,
since the CMRR remains high up to 200 Hz.
The AD627 provides superior performance, uses less circuit
board area and does it for a lower cost than micropower discrete
designs.
FREQUENCY ≠ Hz
100
1
CMRR ≠ dB
90
80
70
60
50
40
30
20
10
0
10
100
1k
10k
TRADITIONAL
LOW POWER
DISCRETE DESIGN
AD627
Figure 1. CMRR vs. Frequency,
±
5 V
S
, Gain = 5

≠2≠
REV. A
AD627≠SPECIFICATIONS
SINGLE SUPPLY
(typical @ +25 C Single Supply, V
S
= +3 V and +5 V and R
L
= 20 k
, unless otherwise noted)
Model
AD627A
AD627B
Specification
Conditions
Min
Typ
Max
Min
Typ
Max
Units
GAIN
G = 5 + (200 k
/R
G
)
Gain Range
5
1000
5
1000
V/V
Gain Error
1
V
OUT
= (≠V
S
) + 0.1 to (+V
S
) ≠ 0.15
G = 5
0.03
0.10
0.01
0.06
%
G = 10
0.15
0.35
0.10
0.25
%
G = 100
0.15
0.35
0.10
0.25
%
G = 1000
0.50
0.70
0.25
0.35
%
Nonlinearity
G = 5
10
100
10
100
ppm
G = 100
20
100
20
100
ppm
Gain vs. Temperature
1
G = 5
10
20
10
20
ppm/
∞
C
G > 5
≠75
≠75
ppm/
∞
C
VOLTAGE OFFSET
Input Offset, V
OSI
2
50
250
25
150
µ
V
Over Temperature
V
CM
= V
REF
= +V
S
/2
445
215
µ
V
Average TC
0.1
3
0.1
1
µ
V/
∞
C
Output Offset, V
OSO
1000
500
µ
V
Over Temperature
1650
1150
µ
V
Average TC
2.5
10
2.5
10
µ
V/
∞
C
Offset Referred to the Input
vs. Supply (PSRR)
G = 5
86
100
86
100
dB
G = 10
100
120
100
120
dB
G = 100
110
125
110
125
dB
G = 1000
110
125
110
125
dB
INPUT CURRENT
Input Bias Current
3
10
3
10
nA
Over Temperature
15
15
nA
Average TC
20
20
pA/
∞
C
Input Offset Current
0.3
1
0.3
1
nA
Over Temperature
2
2
nA
Average TC
1
1
pA/
∞
C
INPUT
Input Impedance
Differential
20 2
20 2
G
pF
Common-Mode
20 2
20 2
G
pF
Input Voltage Range
3
V
S
= +2.2 V to +36 V
(≠V
S
) ≠ 0.1
(+V
S
) ≠ 1
(≠V
S
) ≠ 0.1
(+V
S
) ≠ 1
V
Common-Mode Rejection
3
Ratio DC to 60 Hz with
V
REF
= V
S
/2
1 k
Source Imbalance
G = 5
V
S
= +3 V, V
CM
= 0 V to +1.9 V
77
90
83
96
dB
G = 5
V
S
= +5 V, V
CM
= 0 V to +3.7 V
77
90
83
96
dB
OUTPUT
Output Swing
R
L
= 20 k
(≠V
S
) + 25
(+V
S
) ≠ 70
(≠V
S
) + 25
(+V
S
) ≠ 70
mV
R
L
= 100 k
(≠V
S
) + 7
(+V
S
) ≠ 25
(≠V
S
) + 7
(+V
S
) ≠ 25
mV
Short-Circuit Current
Short-Circuit to Ground
±
25
±
25
mA
DYNAMIC RESPONSE
Small Signal ≠3 dB Bandwidth
G = 5
80
80
kHz
G = 100
3
3
kHz
G = 1000
0.4
0.4
kHz
Slew Rate
+0.05/≠0.07
+0.05/≠0.07
V/
µ
s
Settling Time to 0.01%
V
S
= +3 V, +1.5 V Output Step
G = 5
65
65
µ
s
G = 100
290
290
µ
s
Settling Time to 0.01%
V
S
= +5 V, +2.5 V Output Step
G = 5
85
85
µ
s
G = 100
330
330
µ
s
Overload Recovery
50% Input Overload
3
3
µ
s
NOTES
1
Does not include effects of external resistor R
G
.
2
See Table III for total RTI errors.
3
See Applications section for input range, gain range and common-mode range.
Specifications subject to change without notice
.

≠3≠
REV. A
AD627
DUAL SUPPLY
(typical @ +25 C Dual Supply, V
S
= 5 V and 15 V and R
L
= 20 k
, unless otherwise noted)
Model
AD627A
AD627B
Specification
Conditions
Min
Typ
Max
Min
Typ
Max
Units
GAIN
G = 5 + (200 k
/R
G
)
Gain Range
5
1000
5
1000
V/V
Gain Error
1
V
OUT
= (≠V
S
) + 0.1 to (+V
S
) ≠ 0.15
G = 5
0.03
0.10
0.01
0.06
%
G = 10
0.15
0.35
0.10
0.25
%
G = 100
0.15
0.35
0.10
0.25
%
G = 1000
0.50
0.70
0.25
0.35
%
Nonlinearity
G = 5
V
S
=
±
5 V/
±
15 V
10/25
100
10/25
100
ppm
G = 100
V
S
=
±
5 V/
±
15 V
10/15
100
10/15
100
ppm
Gain vs. Temperature
1
G = 5
10
20
10
20
ppm/
∞
C
G > 5
≠75
≠75
ppm/
∞
C
VOLTAGE OFFSET
Total RTI Error = V
OSI
+ V
OSO/G
Input Offset, V
OSI
2
25
200
25
125
µ
V
Over Temperature
V
CM
= V
REF
= 0 V
395
190
µ
V
Average TC
0.1
3
0.1
1
µ
V/
∞
C
Output Offset, V
OSO
1000
500
µ
V
Over Temperature
1700
1100
µ
V
Average TC
2.5
10
2.5
10
µ
V/
∞
C
Offset Referred to the Input
vs. Supply (PSRR)
G = 5
86
100
86
100
dB
G = 10
100
120
100
120
dB
G = 100
110
125
110
125
dB
G = 1000
110
125
110
125
dB
INPUT CURRENT
Input Bias Current
2
10
2
10
nA
Over Temperature
15
15
nA
Average TC
20
20
pA/
∞
C
Input Offset Current
0.3
1
0.3
1
nA
Over Temperature
5
5
nA
Average TC
5
5
pA/
∞
C
INPUT
Input Impedance
Differential
20 2
20 2
G
pF
Common-Mode
20 2
20 2
G
pF
Input Voltage Range
3
V
S
=
±
1.1 V to
±
18 V
(≠V
S
) ≠ 0.1
(+V
S
) ≠ 1
(≠V
S
) ≠ 0.1
(+V
S
) ≠ 1
V
Common-Mode Rejection
3
Ratio DC to 60 Hz with
1 k
Source Imbalance
G = 5≠1000
V
S
=
±
5 V, V
CM
= ≠4 V to +3.0 V
77
90
83
96
dB
G = 5≠1000
V
S
=
±
15 V, V
CM
= ≠12 V to +10.9 V
77
90
83
96
dB
OUTPUT
Output Swing
R
L
= 20 k
(≠V
S
) + 25
(+V
S
) ≠ 70
(≠V
S
) + 25
(+V
S
) ≠ 70
mV
R
L
= 100 k
(≠V
S
) + 7
(+V
S
) ≠ 25
(≠V
S
) + 7
(+V
S
) ≠ 25
mV
Short-Circuit Current
Short Circuit to Ground
±
25
±
25
mA
DYNAMIC RESPONSE
Small Signal ≠3 dB Bandwidth
G = 5
80
80
kHz
G = 100
3
3
kHz
G = 1000
0.4
0.4
kHz
Slew Rate
+0.05/≠0.06
+0.05/≠0.06
V/
µ
s
Settling Time to 0.01%
V
S
=
±
5 V, +5 V Output Step
G = 5
135
135
µ
s
G = 100
350
350
µ
s
Settling Time to 0.01%
V
S
=
±
15 V, +15 V Output Step
G = 5
330
330
µ
s
G = 100
560
560
µ
s
Overload Recovery
50% Input Overload
3
3
µ
s
NOTES
1
Does not include effects of external resistor R
G
.
2
See Table III for total RTI errors.
3
See Applications section for input range, gain range and common-mode range.
Specifications subject to change without notice.

≠4≠
REV. A
AD627≠SPECIFICATIONS
ORDERING GUIDE
Model
Temperature Range
Package Descriptions
Package Options
AD627AN
≠40
∞
C to +85
∞
C
Plastic DIP
N-8
AD627AR
≠40
∞
C to +85
∞
C
Small Outline (SOIC)
SO-8
AD627AR-REEL
≠40
∞
C to +85
∞
C
8-Lead SOIC 13" Reel
SO-8
AD627AR-REEL7
≠40
∞
C to +85
∞
C
8-Lead SOIC 7" Reel
SO-8
AD627BN
≠40
∞
C to +85
∞
C
Plastic DIP
N-8
AD627BR
≠40
∞
C to +85
∞
C
Small Outline (SOIC)
SO-8
AD627BR-REEL
≠40
∞
C to +85
∞
C
8-Lead SOIC 13" Reel
SO-8
AD627BR-REEL7
≠40
∞
C to +85
∞
C
8-Lead SOIC 7" Reel
SO-8
BOTH DUAL AND SINGLE SUPPLIES
Model
AD627A
AD627B
Specification
Conditions
Min
Typ
Max
Min
Typ
Max
Units
NOISE
Voltage Noise, 1 kHz
Total RTI Noise =
(eni)
(eno/ )
2
2
G
+
Input, Voltage Noise, eni
38
38
nV/
Hz
Output, Voltage Noise, eno
177
177
nV/
Hz
RTI, 0.1 Hz to 10 Hz
G = 5
1.2
1.2
µ
V p-p
G = 1000
0.56
0.56
µ
V p-p
Current Noise
f = 1 kHz
50
50
fA/
Hz
0.1 Hz to 10 Hz
1.0
1.0
pA p-p
REFERENCE INPUT
R
IN
R
G
=
125
125
k
Gain to Output
1
1
Voltage Range
1
POWER SUPPLY
Operating Range
Dual Supply
±
1.1
±
18
±
1.1
±
18
V
Single Supply
2.2
36
2.2
36
V
Quiescent Current
60
85
60
85
µ
A
Over Temperature
200
200
nA/
∞
C
TEMPERATURE RANGE
For Specified Performance
≠40
+85
≠40
+85
∞
C
NOTES
1
See Applications section for input range, gain range and common-mode range.
Specifications subject to change without notice.
ABSOLUTE MAXIMUM RATINGS
1
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
±
18 V
Internal Power Dissipation
2
Plastic Package (N) . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 W
Small Outline Package (R) . . . . . . . . . . . . . . . . . . . . . 0.8 W
≠IN, +IN . . . . . . . . . . . . . . . . . . . . . ≠V
S
≠ 20 V to +V
S
+ 20 V
Common-Mode Input Voltage . . . . ≠V
S
≠ 20 V to +V
S
+ 20 V
Differential Input Voltage (+IN ≠ (≠IN)) . . . . . . . . +V
S
≠
(≠V
S
)
Output Short Circuit Duration . . . . . . . . . . . . . . . . Indefinite
Storage Temperature Range N, R . . . . . . . . ≠65
∞
C to +125
∞
C
Operating Temperature Range . . . . . . . . . . . ≠40
∞
C to +85
∞
C
Lead Temperature Range (Soldering 10 sec) . . . . . . . . +300
∞
C
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD627 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
WARNING!
ESD SENSITIVE DEVICE
NOTES
1
Stresses above those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; functional operation of the
device at these or any other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
2
Specification is for device in free air:
8-Lead Plastic DIP Package:
JA
= 90
∞
C/W.
8-Lead SOIC Package:
JA
= 155
∞
C/W.

AD627
≠5≠
REV. A
Typical Performance Characteristics
(@ +25 C V
S
= 5 V, R
L
= 20 k unless otherwise noted)
FREQUENCY ≠ Hz
100
1
NOISE ≠ nV/ Hz, RTI
90
80
70
60
50
40
30
20
10
0
10
100
1k
10k
100k
GAIN = 5
GAIN = 100
GAIN = 1000
Figure 2. Voltage Noise Spectral Density vs. Frequency
FREQUENCY ≠ Hz
100
1
CURRENT NOISE ≠ fA/ Hz
90
80
70
60
50
40
30
20
10
0
10
100
1k
10k
Figure 3. Current Noise Spectral Density vs. Frequency
COMMON-MODE INPUT ≠ Volts
≠3.200
≠2.000
≠15
15
≠10
INPUT BIAS CURRENT ≠ nA
≠5
0
5
10
≠3.000
≠2.800
≠2.600
≠2.400
≠2.200
Figure 4. I
BIAS
vs. CMV, V
S
=
±
15 V
TEMPERATURE ≠ C
≠5.5
≠3.5
≠1.5
≠60
140
≠40
INPUT BIAS CURRENT ≠ nA
≠20
0
20
40
60
80
100
120
≠5.0
≠4.5
≠2.5
≠2.0
≠4.0
≠3.0
V
S
= +5V
V
S
= 5V
V
S
= 15V
Figure 5. Input Bias Current vs. Temperature
TOTAL POWER SUPPLY VOLTAGE ≠ Volts
65.5
59.5
0
40
5
POWER SUPPLY CURRENT ≠
A
10
15
20
25
30
35
64.5
63.5
62.5
61.5
60.5
Figure 6. Supply Current vs. Supply Voltage
OUTPUT CURRENT ≠ mA
V+
0
OUTPUT VOLTAGE SWING ≠ Volts
(V+) ≠1
(V+) ≠2
(V+) ≠3
(V≠) +2
(V≠) +1
V≠
5
10
15
20
25
V
S
= 1.5V
SOURCING
V
S
= 2.5V
V
S
= 5V
V
S
= 15V
SINKING
V
S
= 1.5V
V
S
= 2.5V
V
S
= 5V
V
S
= 15V
Figure 7. Output Voltage Swing vs. Output Current

AD627
≠6≠
REV. A
10
0%
100
90
1s
500mV
Figure 8. 0.1 Hz to 10 Hz Current Noise (0.71 pA/DIV)
10
0%
100
90
1s
20mV
Figure 9. 0.1 Hz to 10 Hz RTI Voltage Noise (400 nV/DIV),
G = 5
10
0%
100
90
1s
2V
Figure 10. 0.1 Hz to 10 Hz RTI Voltage Noise (200 nV/DIV),
G = 1000
G = 1000
G = 100
G = 5
FREQUENCY ≠ Hz
120
PSRR ≠ dB
110
100
90
80
70
60
50
40
30
20
10
100
1k
10k
100k
Figure 11. Positive PSRR vs. Frequency,
±
5 V
FREQUENCY ≠ Hz
100
PSRR ≠ dB
90
80
70
60
50
40
30
20
10
0
10
100
1k
10k
100k
G = 1000
G = 100
G = 5
Figure 12. Negative PSRR vs. Frequency,
±
5 V
G = 1000
G = 100
G = 5
FREQUENCY ≠ Hz
120
PSRR ≠ dB
110
100
90
80
70
60
50
40
30
20
10
100
1k
10k
100k
Figure 13. Positive PSRR vs. Frequency (V
S
= +5 V, 0 V)

AD627
≠7≠
REV. A
GAIN ≠ V/V
10
0.1
5
1k
SETTLING TIME ≠ ms
1
100
10
Figure 14. Settling Time to 0.01% vs. Gain for a 5 V Step
at Output, R
L
= 20 k
, C
L
= 100 pF, V
S
=
±
5 V
Figure 15. Large Signal Pulse Response and Settling
Time, G = ≠5, R
L
= 20 k
, C
L
= 100 pF (1.5 mV = 0.01%)
Figure 16. Large Signal Pulse Response and Settling
Time, G = ≠10, R
L
= 20 k
, C
L
= 100 pF (1.0 mV = 0.01%)
OUTPUT PULSE ≠ Volts
400
200
0
0
10
SETTLING TIME ≠
s
2
4
6
8
300
100
Figure 17. Settling Time to 0.01% vs. Output Swing,
G = 5, R
L
= 20 k
, C
L
= 100 pF
Figure 18. Large Signal Pulse Response and Settling
Time, G = ≠100, R
L
= 20 k
, C
L
= 100 pF (100
µ
V = 0.01%)
Figure 19. Large Signal Pulse Response and Settling
Time, G = ≠1000, R
L
= 20 k
, C
L
= 100 pF (10
µ
V = 0.01%)

AD627
≠8≠
REV. A
G = 5
G = 100
G = 1000
FREQUENCY ≠ Hz
100
CMRR ≠ dB
90
80
70
60
50
40
30
20
10
0
1
10
1k
10k
100k
110
120
100
Figure 20. CMRR vs. Frequency,
±
5 V
S
, (CMV = 200 mV p-p)
FREQUENCY ≠ Hz
70
GAIN ≠ dB
60
50
40
30
20
10
0
≠10
≠20
≠30
100
1k
10k
100k
G = 1000
G = 100
G = 5
G = 10
Figure 21. Gain vs. Frequency (V
S
= +5 V, 0 V), V
REF
= 2.5 V
Figure 22. Small Signal Pulse Response, G = +5,
R
L
= 20 k
, C
L
= 50 pF
Figure 23. Small Signal Pulse Response, G = +10,
R
L
= 20 k
, C
L
= 50 pF
Figure 24. Small Signal Pulse Response, G = +100,
R
L
= 20 k
, C
L
= 50 pF
Figure 25. Small Signal Pulse Response,
G = +1000, R
L
= 20 k
, C
L
= 50 pF

AD627
≠9≠
REV. A
20 V/DIV
V
OUT
0.5V/DIV
Figure 26. Gain Nonlinearity, V
S
=
±
2.5 V, G = 5
(4 ppm/DIV)
V
OUT
0.5V/DIV
40 V/DIV
Figure 27. Gain Nonlinearity, V
S
=
±
2.5 V, G = 100
(8 ppm/DIV)
V
OUT
3V/DIV
40 V/DIV
Figure 28. Gain Nonlinearity, V
S
=
±
15 V, G = 5
(1.5 ppm/DIV)
V
OUT
3V/DIV
200 V/DIV
Figure 29. Gain Nonlinearity, V
S
=
±
15 V, G = 100
(7 ppm/DIV)
V
OUT
3V/DIV
200 V/DIV
Figure 30. Gain Nonlinearity, V
S
=
±
15 V, G = +5 (7 ppm/DIV)
V
OUT
3V/DIV
200 V/DIV
Figure 31. Gain Nonlinearity, V
S
=
±
15 V, G = +100 (7 ppm/DIV)

AD627
≠10≠
REV. A
THEORY OF OPERATION
The AD627 is a true "instrumentation amplifier" built using
two feedback loops. Its general properties are similar to those of
the classic "two op amp" instrumentation amplifier configura-
tion, and can be regarded as such, but internally the details are
somewhat different. The AD627 uses a modified "current feed-
back" scheme which, coupled with interstage feedforward
frequency compensation, results in a much better CMRR
(Common-Mode Rejection Ratio) at frequencies above dc (no-
tably the line frequency of 50 Hz≠60 Hz) than might otherwise
be expected of a low power instrumentation amplifier.
Referring to the diagram, (Figure 32), A1 completes a feedback
loop which, in conjunction with V1 and R5, forces a constant
collector current in Q1. Assume that the gain-setting resistor
(R
G
) is not present for the moment. Resistors R2 and R1 com-
plete the loop and force the output of A1 to be equal to the
voltage on the inverting terminal with a gain of (almost exactly)
1.25. A nearly identical feedback loop completed by A2 forces a
current in Q2 which is substantially identical to that in Q1, and
A2 also provides the output voltage. When both loops are bal-
anced, the gain from the noninverting terminal to V
OUT
is equal
to 5, whereas the gain from the output of A1 to V
OUT
is equal to
≠4. The inverting terminal gain of A1, (1.25) times the gain of
A2, (≠4) makes the gain from the inverting and noninverting
terminals equal.
R5
200k
≠V
S
OUTPUT
+V
S
≠V
S
2k
+IN
Q2
+V
S
≠V
S
Q1
2k
≠IN
R1
100k
REF
EXTERNAL GAIN RESISTOR
R4
100k
R3
25k
R2
25k
R
G
V1
R6
200k
A2
A1
Figure 32. Simplified Schematic
The differential mode gain is equal to 1 + R4/R3, nominally five
and is factory trimmed to 0.01% final accuracy. Adding an external
gain setting resistor (R
G
) increases the gain by an amount equal
to (R4 + R1)/R
G
. The output voltage of the AD627 is given by the
following equation.
V
OUT
= [V
IN
(+) ≠ V
IN
(≠)]
◊
(5 + 200 k
/R
G
) + V
REF
Laser trims are performed on R1 through R4 to ensure that
their values are as close as possible to the absolute values in the
gain equation. This ensures low gain error and high common-
mode rejection at all practical gains.
USING THE AD627
Basic Connections
Figure 33 shows the basic connection circuit for the AD627.
The +V
S
and ≠V
S
terminals are connected to the power supply.
The supply can either be bipolar (V
S
=
±
1.1 V to
±
18 V) or
single supply (≠V
S
= 0 V, +V
S
= +2.2 V to +36 V). The power
supplies should be capacitively decoupled close to the devices
power pins. For best results, use surface mount 0.1
µ
F ceramic
chip capacitors.
The input voltage, which can be either single ended (tie either
≠IN or +IN to ground) or differential. The difference between
the voltage on the inverting and noninverting pins is amplified
by the programmed gain. The programmed gain is set by the
gain resistor (see below). The output signal appears as the volt-
age difference between the output pin and the externally applied
voltage on the REF pin (see below).
Setting the Gain
The AD627s gain is resistor programmed by R
G
, or more pre-
cisely, by whatever impedance appears between Pins 1 and 8.
The gain is set according to the equation:
Gain = 5 + (200 k
/R
G
)
or
R
G
= 200 k
/(Gain ≠ 5)
It follows that the minimum achievable gain is 5 (for R
G
=
).
With an internal gain accuracy of between 0.05% and 0.7%
depending on gain and grade, a 0.1% external gain resistor
would seem appropriate to prevent significant degradation of the
overall gain error. However, 0.1% resistors are not available in a
wide range of values and are quite expensive. Table I shows
recommended gain resistor values using 1% resistors. For all
gains, the size of the gain resistor is conservatively chosen as the
closest value from the standard resistor table that is higher than
the ideal value. This results in a gain that is always slightly less
than the desired gain. This prevents clipping of the signal at the
output due to resistor tolerance.
The internal resistors on the AD627 have a negative tempera-
ture coefficient of ≠75 ppm/
∞
C max for gains > 5. Using a gain
resistor that also has a negative temperature coefficient of
≠75 ppm/
∞
C or less will tend to reduce the overall circuit's gain
drift.
0.1 F
≠1.1V TO ≠18V
0.1 F
+V
S
≠V
S
+1.1V TO +18V
R
G
+IN
≠IN
REF (INPUT)
V
OUT
V
IN
R
G
R
G
OUTPUT
REF
+V
S
+2.2V TO +36V
R
G
+IN
≠IN
REF (INPUT)
V
OUT
V
IN
R
G
R
G
OUTPUT
REF
GAIN = 5 + (200k /R
G
)
0.1 F
Figure 33. Basic Connections for Single and Dual Supplies

AD627
≠11≠
REV. A
Table I. Recommended Values of Gain Resistors
Desired
1% Std Table
Resulting
Gain
Value of R
G
,
Gain
5
5
6
200 k
6
7
100 k
7
8
68.1 k
7.93
9
51.1 k
8.91
10
40.2 k
9.98
15
20 k
15
20
13.7 k
19.6
25
10 k
25
30
8.06 k
29.81
40
5.76 k
39.72
50
4.53 k
49.15
60
3.65 k
59.79
70
3.09 k
69.73
80
2.67 k
79.9
90
2.37 k
89.39
100
2.1 k
99.24
200
1.05 k
195.48
500
412
489.44
1000
205
980.61
Reference Terminal
The reference terminal potential defines the zero output voltage
and is especially useful when the load does not share a precise
ground with the rest of the system. It provides a direct means of
injecting a precise offset to the output. The reference terminal is
also useful when bipolar signals are being amplified as it can be
used to provide a virtual ground voltage.
Since the AD627 output voltage is developed with respect to the
potential on the reference terminal, it can solve many grounding
problems by simply tying the REF pin to the appropriate "local
ground." The REF pin should however be tied to a low imped-
ance point for optimal CMR.
Input Range Limitations in Single Supply Applications
In general, the maximum achievable gain is determined by the
available output signal range. However, in single supply applica-
tions where the input common mode voltage is close to or equal
to zero, some limitations on the gain can be set. While the In-
put, Output and Reference Pins have ranges that are nominally
defined on the specification pages, there is a mutual interdepen-
dence between the voltage ranges on these pins. Figure 34 shows
the simplified schematic of the AD627, driven by a differential
voltage V
DIFF
which has a common mode component, V
CM
. The
voltage on the output of op amp A1 is a function of V
DIFF
, V
CM
,
the voltage on the REF pin and the programmed gain. This
voltage is given by the equation:
V
A1
= 1.25 (V
CM
+ 0.5 V) ≠ 0.25 V
REF
≠ V
DIFF
(25 k
/R
G
≠ 0.625)
We can also express the voltage on A1 as a function of the ac-
tual voltages on the ≠IN and +IN pins (V≠ and V+)
V
A1
= 1.25 (V≠ + 0.5 V) ≠ 0.25 V
REF
≠ (V+ ≠ V≠) 25 k
/R
G
A1's output is capable of swinging to within 50 mV of the nega-
tive rail and to within 200 mV of the positive rail. From either of
the above equations, it is clear that an increasing V
REF
, (while it
acts as a positive offset at the output of the AD627), tends to
decrease the voltage on A1. Figures 35 and 36 show the maxi-
mum voltages that can be applied to the REF pin, for a gain of
five for both the single and dual supply cases. Raising the input
common-mode voltage will increase the voltage on the output of
A1. However, in single supply applications where the common-
mode voltage is low, a differential input voltage or a voltage on
REF that is too high can drive the output of A1 into the ground
rail. Some low side headroom is added by virtue of both inputs
being shifted upwards by about 0.5 V (i.e., by the V
BE
of Q1
and Q2). The above equations can be used to check that the
voltage on amplifier A1 is within its operating range.
Table II gives values for the maximum gains for various single
supply input conditions. The resulting output swings shown
refer to 0 V. The voltages on the REF pins has been set to either
A1
200k
≠V
S
OUTPUT
+V
S
≠V
S
2k
+IN
Q2
+V
S
≠V
S
Q1
2k
≠IN
100k
REF
EXTERNAL GAIN RESISTOR
100k
25k
25k
R
G
200k
≠IN
V
A
+IN
V
CM
V+
V≠
V
DIFF
2
V
DIFF
2
A2
Figure 34. Amplifying Differential Signals with a Common-Mode Component
Table II. Maximum Gain for Low Common-Mode Single Supply Applications
REF
Supply
R
G
(1%
Resulting
Output Swing
V
IN
Pin
Voltage
Tolerance)
Max Gain
WRT 0 V
±
100 mV, V
CM
= 0 V
2 V
+5 V to +15 V
28.7 k
12.0
0.8 V to 3.2 V
±
50 mV, V
CM
= 0 V
2 V
+5 V to +15 V
10.7 k
23.7
0.8 V to 3.2 V
±
10 mV, V
CM
= 0 V
2 V
+5 V to +15 V
1.74 k
119.9
0.8 V to 3.2 V
V≠ = 0 V, V+ = 0 V to 1 V
1 V
+10 V to +15 V
78.7 k
7.5
1 V to 8.5 V
V≠ = 0 V, V+ = 0 mV to 100 mV
1 V
+5 V to +15 V
7.87 k
31
1 V to 4.1 V
V≠ = 0 V, V+ = 0 mV to 10 mV
1 V
+5 V to +15 V
7.87
259.1
1 V to 3.6 V

AD627
≠12≠
REV. A
2 V or 1 V to maximize the available gain and output swing.
Note that in most cases, there is no advantage to increasing the
single supply to greater than 5 V (the exception being an input
range of 0 V to 1 V).
V
IN
(≠) ≠ Volts
5
≠6
V
REF
≠ Volts
4
3
2
1
0
≠1
≠2
≠3
≠4
≠5
≠5
≠4
≠3
≠2
≠1
0
1
2
3
4
MAXIMUM V
REF
MINIMUM V
REF
Figure 35. Reference Input Voltage vs. Negative Input
Voltage, V
S
=
±
5 V, G = 5
V
IN
(≠) ≠ Volts
5
≠0.5
V
REF
≠ Volts
4
3
2
1
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
MAXIMUM V
REF
MINIMUM V
REF
Figure 36. Reference Input Voltage vs. Negative Input
Voltage, V
S
= +5 V, G = 5
Output Buffering
The AD627 is designed to drive loads of 20 k
or greater but
can deliver up to 20 mA to heavier loads at lower output voltage
swings (see Figure 7). If more than 20 mA of output current is
required at the output, the AD627's output should be buffered
with a precision op amp such as the OP113 as shown in Figure
37 (shown for the single supply case). This op amp can swing
from 0 V to 4 V on its output while driving a load as small as
600
.
0.1 F
+V
S
≠V
S
R
G
V
IN
REF
0.1 F
0.1 F
≠V
S
0.1 F
V
OUT
AD627
OP113
Figure 37. Output Buffering
INPUT AND OUTPUT OFFSET ERRORS
The low errors of the AD627 are attributed to two sources,
input and output errors. The output error is divided by G when
referred to the input. In practice, the input errors dominate at
high gains and the output errors dominate at low gains. The
total offset error for a given gain is calculated as:
Total Error RTI = Input Error + (Output Error/Gain)
Total Error RTO = (Input Error
◊
G) + Output Error
RTI offset errors and noise voltages for different gains are shown
below in Table III.
Table III. RTI Error Sources
Max Total
Max Total
RTI Offset Error
RTI Offset Drift
Total RTI Noise
V
V
V/ C
V/ C
nV/
Hz
Gain AD627A
AD627B AD627A
AD627B AD627A & AD627B
5
450
250
5
3
95
10
350
200
4
2
66
20
300
175
3.5
1.5
56
50
270
160
3.2
1.2
53
100
270
155
3.1
1.1
52
500
252
151
3
1
52
1000 251
151
3
1
52
Make vs. Buy: A Typical Application Error Budget
The example in Figure 38 serves as a good comparison between
the errors associated with an integrated and a discrete in amp
implementation. A
±
100 mV signal from a resistive bridge
(common-mode voltage = +2.5 V) is to be amplified. This ex-
ample compares the resulting errors from a discrete two op
amp in amp and from the AD627. The discrete implementation
uses a four-resistor precision network (1% match, 50 ppm/
∞
C
tracking).
The errors associated with each implementation are detailed in
Table IV and show the integrated in amp to be more precise,
both at ambient and over temperature. It should be noted that
the discrete implementation is also more expensive. This is pri-
marily due to the relatively high cost of the low drift precision
resistor network.
Note, the input offset current of the discrete in amp implemen-
tation is the difference in the bias currents of the two op amps,
not the offset currents of the individual op amps. Also, while the
values of the resistor network are chosen so that the inverting
and noninverting inputs of each op amp see the same impedance
(about 350
), the offset current of each op amp will add an
additional error which must be characterized.
Errors Due to AC CMRR
In Table IV, the error due to common-mode rejection is the
error that results from the common-mode voltage from the
bridge 2.5 V. The ac error due to nonideal common-mode
rejection cannot be calculated without knowing the size of the ac
common-mode voltage (usually interference from 50 Hz/60 Hz
mains frequencies).
A mismatch of 0.1% between the four gain setting resistors will
determine the low frequency CMRR of a two op amp in amp.
The plot in Figure 38 shows the practical results, at ambient
temperature, of resistor mismatch. The CMRR of the circuit in
Figure 39 (Gain = 11) was measured using four resistors which

AD627
≠13≠
REV. A
had a mismatch of almost exactly 0.1% (R1 = 9999.5
, R2 =
999.76
, R3 = 1000.2
, R4 = 9997.7
). As expected the
CMRR at dc was measured at about 84 dB (calculated value
is 85 dB). However, as the frequency increases, the CMRR
quickly degrades. For example, a 200 mV peak-peak harmonic
of the mains frequency at 180 Hz would result in an output
voltage of about 800
µ
V. To put this in context, a 12-bit data
acquisition system with an input range of 0 V to 2.5 V, has an
LSB weighting of 610
µ
V.
By contrast, the AD627 uses precision laser trimming of internal
resistors along with patented CMR trimming to yield a higher
dc CMRR and a wider bandwidth over which the CMRR is flat
(see Figure 20).
AD296
1/2
R2
999.76
R1
9999.5
R3
1000.2
R4
9997.7
V
OUT
+5V
VIN+
VIN≠
≠5V
A1
A2
AD296
1/2
Figure 39. 0.1% Resistor Mismatch Example
+5V
40.2k
1%
+10ppm/ C
AD627A
2.5V
V
OUT
350
350
350
350
100mV
+5V
AD627A GAIN = 9.98
(
5+(200k /R
G
)
)
1/2
350 *
3.15k *
350 *
2.5V
3.15k *
V
OUT
+5V
1/2
"HOMEBREW" IN AMP, G = 10
*1% REGISTER MATCH, 50ppm/ C TRACKING
LT1078IS8
LT1078IS8
R
G
Figure 38. Make vs. Buy
FREQUENCY ≠ Hz
120
1
CMRR ≠ dB
110
100
90
80
70
60
50
40
30
20
10
100
1k
10k
100k
Figure 40. CMRR Over Frequency of Discrete In Amp in
Figure 39
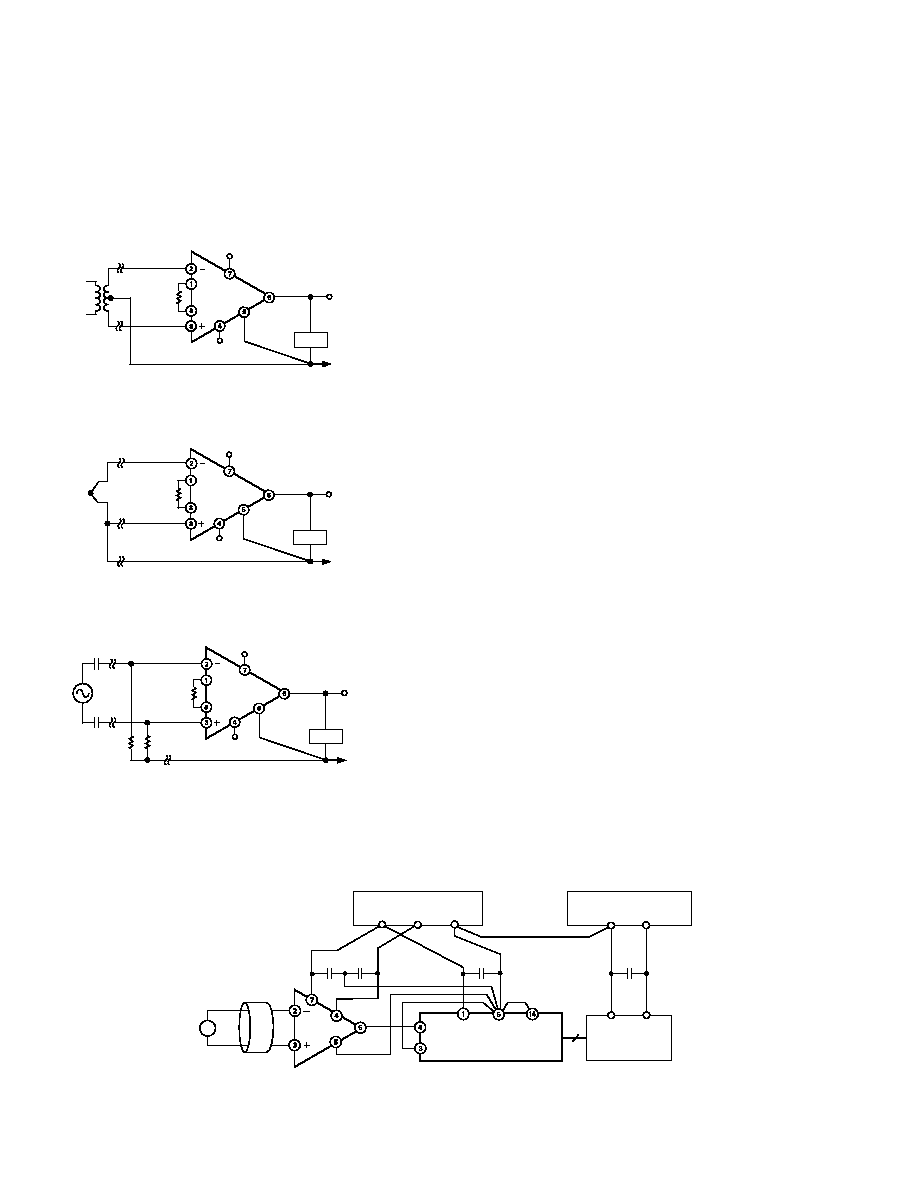
Ground Returns for Input Bias Currents
Input bias currents are those dc currents that must flow in
order to bias the input transistors of an amplifier. These are
usually transistor base currents. When amplifying "floating"
input sources such as transformers, or ac-coupled sources,
there must be a direct dc path into each input in order that the
bias current can flow. Figure 41 shows how a bias current
path can be provided for the case of transformer coupling,
capacitive ac-coupling and for a thermocouple application.
Table IV. Make vs. Buy Error Budget
"Homebrew"
Total Error
Total Error
Error Source
AD627 Circuit Calculation
Circuit Calculation
AD627-ppm
Homebrew≠ppm
ABSOLUTE ACCURACY at T
A
= +25
∞
C
Total RTI Offset Voltage, mV
(250
µ
V + (1000
µ
V/10))/100 mV
(180
µ
V
◊
2)/100 mV
3500
3600
Input Offset Current, nA
1 nA
◊
350
/100 mV
20 nA
◊
350
/100 mV
3.5
70
Internal Offset Current (Homebrew Only)
Not Applicable
0.7 nA
◊
350
/100 mV
2.45
CMRR, dB
77 dB°141 ppm
◊
2.5 V/100 mV
(1% Match
◊
2.5 V)/10/100 mV
3531
25000
Gain
0.35% + 0.1%
1% Match
13500
10000
Total Absolute Error
20535
38672
DRIFT TO +85
∞
C
Gain Drift, ppm/
∞
C
(≠75 + 10) ppm/
∞
C
◊
60
∞
C
50 ppm/
∞
C
◊
60
∞
C
3900
3000
Total RTI Offset Voltage, mV/
∞
C
(3.0
µ
V/
∞
C + (10
µ
V/
∞
C/10))
(2
◊
3.5
µ
V/
∞
C
◊
60
∞
C)/100 mV
◊
60
∞
C/100 mV
2600
4200
Input Offset Current, pA/
∞
C
(16 pA/
∞
C
◊
350
◊
60
∞
C)/100 mV (33 pA/
∞
C
◊
350
◊
60
∞
C)/100 mV
3.5
7
Total Drift Error
6504
7207
Grand Total Error
27039
45879
AD627
≠14≠
REV. A
In dc-coupled resistive bridge applications, providing this path
is generally not necessary as the bias current simply flows from
the bridge supply, through the bridge and into the amplifier.
However, if the impedance that the two inputs see are large, and
differ by a large amount (>10 k
), the offset current of the
input stage will cause dc errors compatible with the input offset
voltage of the amplifier.
LOAD
TO POWER
SUPPLY
GROUND
R
G
≠INPUT
+INPUT
AD627
V
OUT
+V
S
REFERENCE
≠V
S
Figure 41a. Ground Returns for Bias Currents with Trans-
former Coupled Inputs
LOAD
TO POWER
SUPPLY
GROUND
R
G
≠INPUT
+INPUT
AD627
V
OUT
+V
S
REFERENCE
≠V
S
Figure 41b. Ground Returns for Bias Currents with Ther-
mocouple Inputs
LOAD
TO POWER
SUPPLY
GROUND
R
G
≠INPUT
+INPUT
AD627
V
OUT
+V
S
REFERENCE
≠V
S
100k
100k
Figure 41c. Ground Returns for Bias Currents with AC
Coupled Inputs
Layout and Grounding
The use of ground planes is recommended to minimize the
impedance of ground returns (and hence the size of dc errors).
In order to isolate low level analog signals from a noisy digital
environment, many data-acquisition components have separate
analog and digital ground returns (Figure 42). All ground pins
from mixed signal components such as analog-to-digital converters
should be returned through the "high quality" analog ground
plane. Digital ground lines of mixed signal components should
also be returned through the analog ground plane. This may
seem to break the rule of keeping analog and digital grounds
separate. However, in general, there is also a requirement to
keep the voltage difference between digital and analog grounds
on a converter as small as possible (typically <0.3 V). The
increased noise, caused by the converter's digital return currents
flowing through the analog ground plane, will generally be negli-
gible. Maximum isolation between analog and digital is achieved
by connecting the ground planes back at the supplies.
If there is only a single power supply available, it must be shared
by both digital and analog circuitry. Figure 43 shows the how to
minimize interference between the digital and analog circuitry.
As in the previous case, separate analog and digital ground
planes should be used (reasonably thick traces can be used as an
alternative to a digital ground plane). These ground planes
should be connected at the power supply's ground pin. Separate
traces (or power planes) should be run from the power supply to
the supply pins of the digital and analog circuits. Ideally each
device should have its own power supply trace, but these can be
shared by a number of devices as long as a single trace is not
used to route current to both digital and analog circuitry.
INPUT PROTECTION
As shown in the simplified schematic (Figure 32), both the
inverting and noninverting inputs are clamped to the positive
and negative supplies by ESD diodes. In addition to this a 2 k
series resistor on each input provides current limiting in the
event of an overvoltage. These ESD diodes can tolerate a maxi-
mum continuous current of 10 mA. So an overvoltage, (that is
the amount by which input voltage exceeds the supply voltage),
of
±
20 V can be tolerated. This is true for all gains, and for
power on and off. This last case is particularly important since
the signal source and amplifier may be powered separately.
If the overvoltage is expected to exceed 20 V, additional external
series resistors current limiting resistors should be used to keep
the diode current to below 10 mA.
DIGITAL POWER SUPPLY
0.1 F
V
IN1
V
IN2
V
DD
AGND DGND
AD7892-2
ADC
12
AGND
V
DD
PROCESSOR
0.1 F
0.1 F
0.1 F
AD627
ANALOG POWER SUPPLY
+5V
≠5V
GND
GND
+5V
Figure 42. Optimal Grounding Practice for a Bipolar Supply Environment with Separate Analog and Digital Supplies

AD627
≠15≠
REV. A
RF INTERFERENCE
All instrumentation amplifiers can rectify high frequency out-of-
band signals. Once rectified, these signals appear as dc offset
errors at the output. The circuit of Figure 44 provides good RFI
suppression without reducing performance within the in amp's
passband. Resistor R1 and capacitor C1 (and likewise, R2 and
C2) form a low pass RC filter that has a ≠3 dB BW equal to:
F = 1/(2
R1C1). Using the component values shown, this
filter has a ≠3 dB bandwidth of approximately 8 kHz. Resistors
R1 and R2 were selected to be large enough to isolate the circuit's
input from the capacitors, but not large enough to significantly
increase the circuit's noise. To preserve common-mode rejec-
tion in the amplifier's pass band, capacitors C1 and C2 need to
be 5% mica units, or low cost 20% units can be tested and
"binned" to provide closely matched devices.
R
G
V
OUT
REFERENCE
0.33 F
0.01 F
+V
S
0.01 F
0.33 F
≠V
S
AD627
C1
1000pF
5%
R1
20k
1%
R2
20k
1%
C3
0.022 F
C2
1000pF
5%
LOCATE C1≠C3 AS CLOSE TO
THE INPUT PINS AS POSSIBLE
+IN
≠IN
Figure 44. Circuit to Attenuate RF Interference
Capacitor C3 is needed to maintain common-mode rejection at
the low frequencies. R1/R2 and C1/C2 form a bridge circuit
whose output appears across the in amp's input pins. Any mis-
match between C1 and C2 will unbalance the bridge and reduce
common-mode rejection. C3 insures that any RF signals are
common mode (the same on both in amp inputs) and are not
applied differentially. This second low pass network, R1 + R2
and C3, has a ≠3 dB frequency equal to: 1/(2
(R1 + R2) (C3)).
Using a C3 value of 0.022
µ
F as shown, the ≠3 dB signal BW of
this circuit is approximately 200 Hz. The typical dc offset shift
over frequency will be less than 1 mV and the circuit's RF signal
rejection will be better than 57 dB. The 3 dB signal bandwidth
of this circuit may be increased by reducing the value of resistors
R1 and R2. The performance is similar to that using 20 k
resistors, except that the circuitry preceding the in amp must
drive a lower impedance load.
The circuit of Figure 44 should be built using a PC board with a
ground plane on both sides. All component leads should be as
short as possible. Resistors R1 and R2 can be common 1%
metal film units but capacitors C1 and C2 need to be
±
5%
tolerance devices to avoid degrading the circuit's common-
mode rejection. Either the traditional 5% silver mica units or
Panasonic
±
2% PPS film capacitors are recommended.
APPLICATIONS CIRCUITS
A Classic Bridge Circuit
Figure 45 shows the AD627 configured to amplify the signal
from a classic resistive bridge. This circuit will work in either
dual or single supply mode. Typically the bridge will be excited
by the same voltage as is used to power the in amp. Connecting
the bottom of the bridge to the negative supply of the in amp (usu-
ally either 0, ≠5 V, ≠12 V or ≠15 V), sets up an input common
mode voltage that is optimally located midway between the
supply voltages. It is also appropriate to set the voltage on the
REF pin to midway between the supplies, especially if the input
signal will be bipolar. However the voltage on the REF pin can
be varied to suit the application. A good example of this is when
the REF pin is tied to the V
REF
pin of an Analog-to-Digital
Converter (ADC) whose input range is (V
REF
±
V
IN
). With an
available output swing on the AD627 of (≠V
S
+ 100 mV) to
(+V
S
≠ 150 mV) the maximum programmable gain is simply this
output range divided by the input range.
AD627
V
OUT
+V
S
V
DIFF
R
G
= 200k
GAIN-5
≠V
S
V
REF
0.1 F
0.1 F
Figure 45. A Classic Bridge Circuit
V
IN
V
DD
AGND DGND
AD7892-2
ADC
12
DGND
V
DD
PROCESSOR
0.1 F
0.1 F
0.1 F
POWER SUPPLY
+5V
GND
AD627
Figure 43. Optimal Ground Practice in a Single Supply Environment

AD627
≠16≠
REV. A
C3430a≠0≠12/99 (rev. A)
PRINTED IN U.S.A.
A 4 mA-to-20 mA Single Supply Receiver
Figure 46 shows how a signal from a 4 mA-to-20 mA transducer
can be interfaced to the AD
µ
C812, a 12-bit ADC with an em-
bedded microcontroller. The signal from a 4 mA-to-20 mA
transducer is single ended. This initially suggests the need for
a simple shunt resistor, to convert the current to a voltage at the
high impedance analog input of the converter. However, any
line resistance in the return path (to the transducer) will add a
current dependent offset error. So the current must be sensed
differentially.
In this example, a 24.9
shunt resistor generates a maximum
differential input voltage to the AD627 of between 100 mV (for
4 mA in) and 500 mV (for 20 mA in). With no gain resistor
present, the AD627 amplifies the 500 mV input voltage by a
factor of 5, to 2.5 V, the full-scale input voltage of the ADC.
The zero current of 4 mA corresponds to a code of 819 and the
LSB size is 4.9 mA.
A Thermocouple Amplifier
Because the common-mode input range of the AD627 extends
0.1 V below ground, it is possible to measure small differential
signals which have low, or no, common mode component. Fig-
ure 47 shows a thermocouple application where one side of the
J-type thermocouple is grounded.
AD627
0.1 F
24.9
G = 5
REF
4≠20mA
4≠20mA
TRANSDUCER
AGND
DGND
AIN 0≠7
V
REF
+5V
AVDD
+5V
DVDD
AD C812
MicroConverter
TM
+5V
LINE
IMPEDANCE
0.1 F
0.1 F
MicroConverter is a trademark of Analog Devices, Inc.
Figure 46. A 4 mA-to-20 mA Receiver Circuit
Over a temperature range from ≠200
∞
C to +200
∞
C, the J-type
thermocouple delivers a voltage ranging from ≠7.890 mV to
10.777 mV. A programmed gain on the AD627 of 100 (R
G
=
2.1 k
) and a voltage on the AD627 REF pin of 2 V, results in
the AD627's output voltage ranging from 1.110 V to 3.077 V
relative to ground. For a different input range or different volt-
age on the REF pin, it is important to check that the voltage on
internal node A1 (see Figure 34) is not driven below ground).
This can be checked using the equations in the section entitled
Input Range Limitations in Single Supply Applications.
R
G
2.1k
AD627
0.1 F
V
OUT
+5V
J-TYPE
THERMOCOUPLE
2V
REF
Figure 47. Amplifying Bipolar Signals with Low Common-
Mode Voltage
8-Lead Plastic DIP
(N-8)
8
1
4
5
0.430 (10.92)
0.348 (8.84)
0.280 (7.11)
0.240 (6.10)
PIN 1
SEATING
PLANE
0.022 (0.558)
0.014 (0.356)
0.060 (1.52)
0.015 (0.38)
0.210 (5.33)
MAX
0.130
(3.30)
MIN
0.070 (1.77)
0.045 (1.15)
0.100
(2.54)
BSC
0.160 (4.06)
0.115 (2.93)
0.325 (8.25)
0.300 (7.62)
0.015 (0.381)
0.008 (0.204)
0.195 (4.95)
0.115 (2.93)
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
8-Lead SOIC
(SO-8)
0.0098 (0.25)
0.0075 (0.19)
0.0500 (1.27)
0.0160 (0.41)
8
0
0.0196 (0.50)
0.0099 (0.25)
45
8
5
4
1
0.1968 (5.00)
0.1890 (4.80)
0.2440 (6.20)
0.2284 (5.80)
PIN 1
0.1574 (4.00)
0.1497 (3.80)
0.0500 (1.27)
BSC
0.0688 (1.75)
0.0532 (1.35)
SEATING
PLANE
0.0098 (0.25)
0.0040 (0.10)
0.0192 (0.49)
0.0138 (0.35)